 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Learning-Based Estimation and Control Framework for Contact-Intensive Tight-Tolerance Tasks
Paper and Code
Oct 11, 2022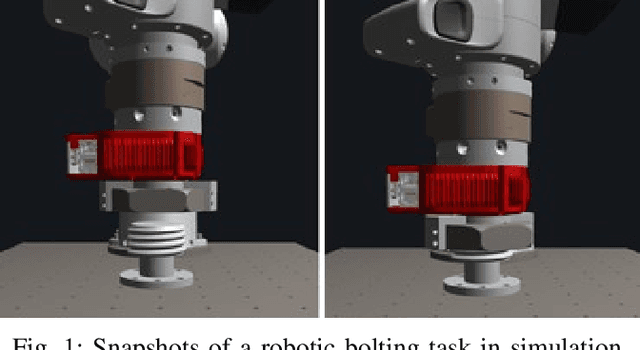
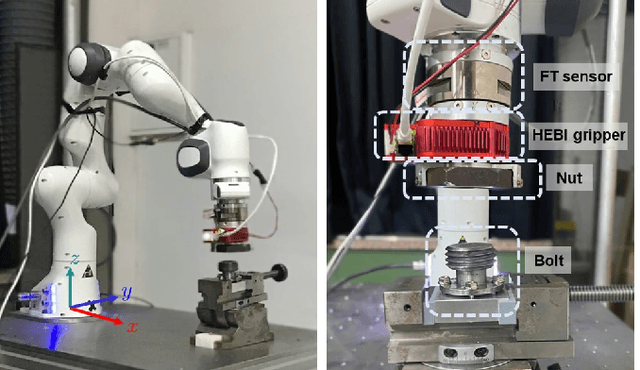
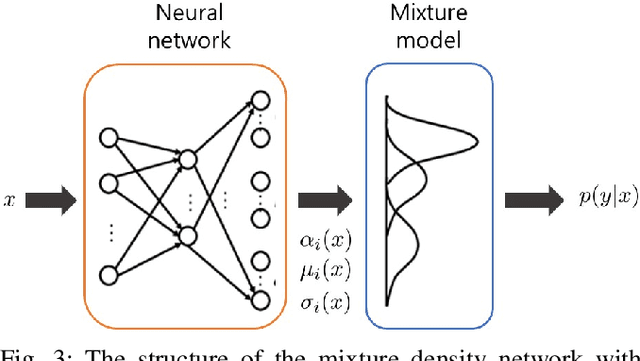
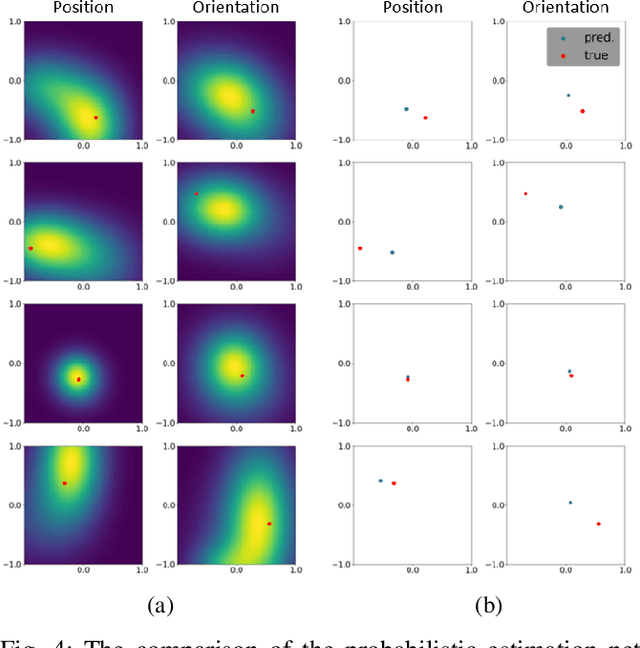
We propose a novel data-driven estimation and control framework for contact-rich tight tolerance tasks, which estimates the pose of the object precisely using data-driven methods and compensates for the remaining error via reinforcement learning (RL). First, the sequential particle filter estimator updates with the mixture density network (MDN), which is to represent the general non-injective conditional probability and thus is suitable for finding out the pose from the measurements including relatively low-dimensional contact wrench sensing. We further develop the RL-based fastening controller that adapts to the remaining error by optimizing the admittance gain to complete the task. The proposed framework is evaluated using an accurate real-time simulator on the bolting task and successfully transferred to an experimental environment.