Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Lane-Change Path Planner and its application with a monocular camera
Paper and Code
Mar 10, 2019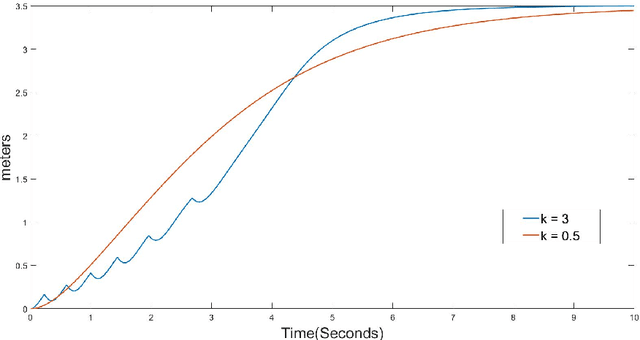
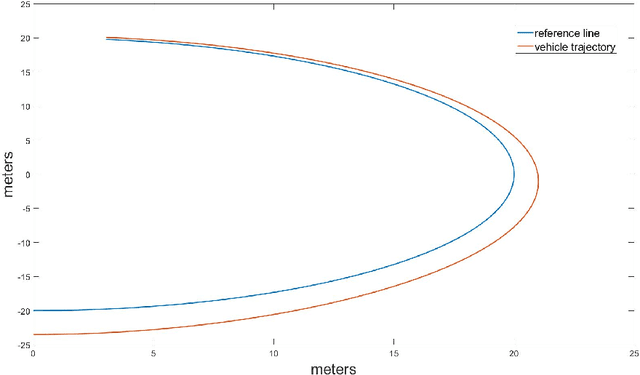
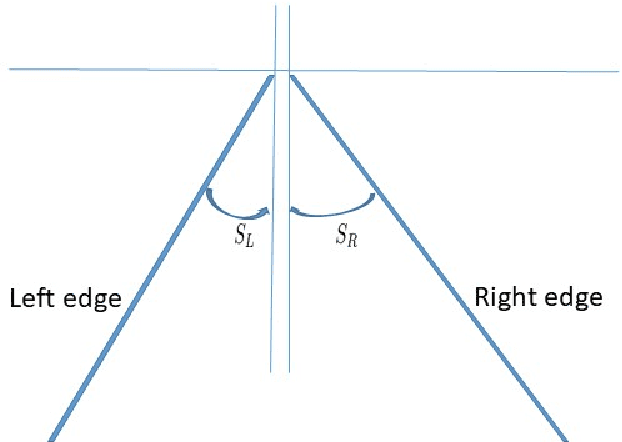
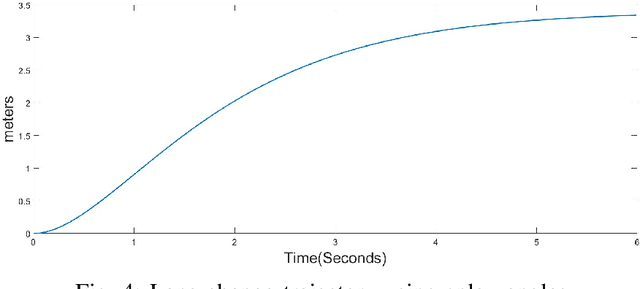
Human drivers utilize the visual cues from the road to performance some fundamental driving tasks, e.g. lane keeping and lane change, for the complex driving maneuvers. Lane keeping and lane change can be generalized as one task, because both of them are to drive a vehicle onto a target lane. In this paper, we first design a lane-change path planner based on HD (High-Definition) map for autonomous driving systems using control theory. Later, applying the similar idea, a lane change controller using a monocular camera is designed.
View paper on