Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hierarchical Approach to Designing Approximate Reasoning-Based Controllers for Dynamic Physical Systems
Paper and Code
Mar 27, 2013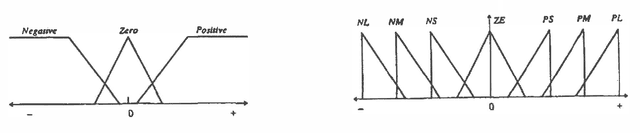

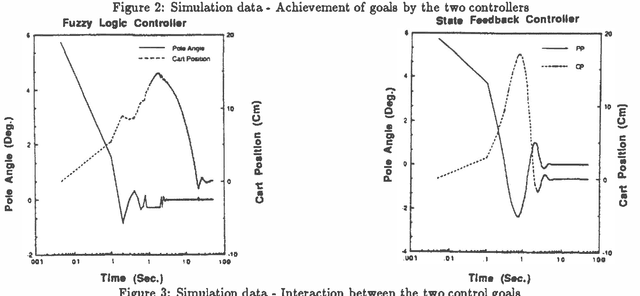
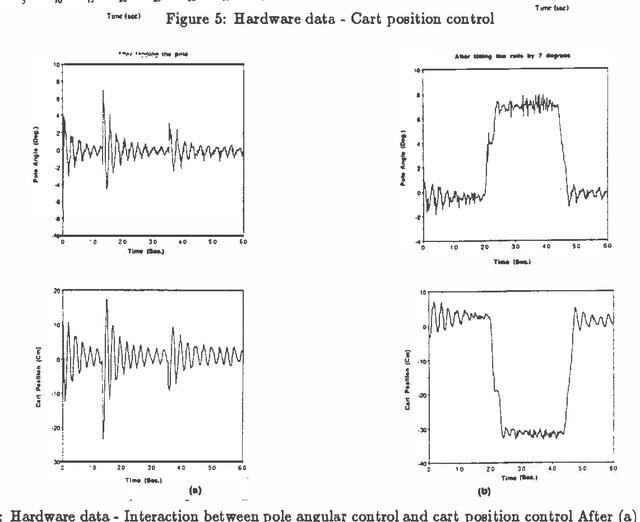
This paper presents a new technique for the design of approximate reasoning based controllers for dynamic physical systems with interacting goals. In this approach, goals are achieved based on a hierarchy defined by a control knowledge base and remain highly interactive during the execution of the control task. The approach has been implemented in a rule-based computer program which is used in conjunction with a prototype hardware system to solve the cart-pole balancing problem in real-time. It provides a complementary approach to the conventional analytical control methodology, and is of substantial use where a precise mathematical model of the process being controlled is not available.
* Appears in Proceedings of the Sixth Conference on Uncertainty in
Artificial Intelligence (UAI1990)
View paper on