Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Generalized Label Correcting Method for Optimal Kinodynamic Motion Planning
Paper and Code
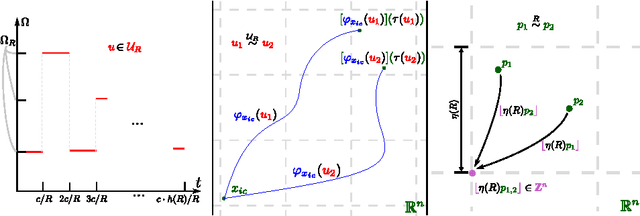
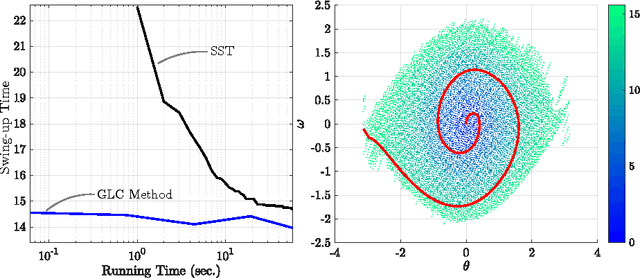
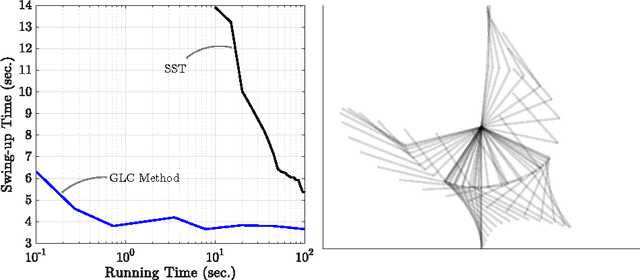
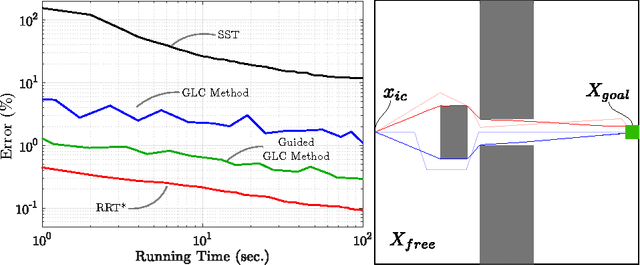
A resolution complete optimal kinodynamic motion planning algorithm is presented and described as a generalized label correcting (GLC) method. In contrast to related algorithms, the GLC method does not require a local planning subroutine and benefits from a simple implementation. The key contributions of this paper are the construction and analysis of the GLC conditions which are the basis of the proposed algorithm. Numerical experiments demonstrate the running time of the GLC method to be less than the related SST algorithm.
* 16 Pages
View paper on