 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA General Framework for Partial to Full Image Registration
Paper and Code
Jul 13, 2022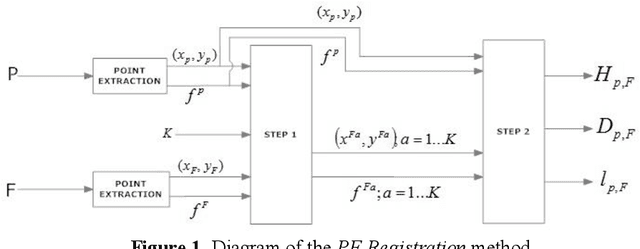
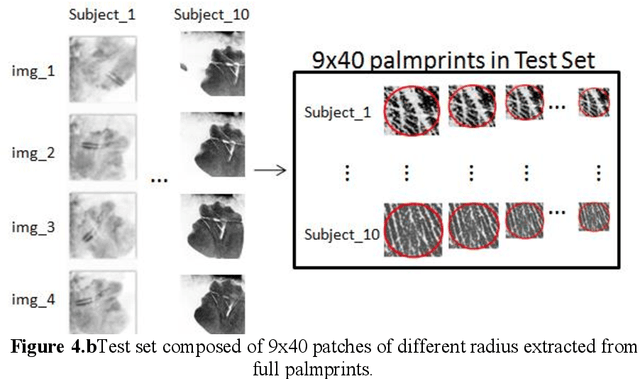
Image registration is a research field in which images must be compared and aligned independently of the point of view or camera characteristics. In some applications (such as forensic biometrics, satellite photography or outdoor scene identification) classical image registration systems fail due to one of the images compared represents a tiny piece of the other image. For instance, in forensics palmprint recognition, it is usual to find only a small piece of the palmprint, but in the database, the whole palmprint has been enrolled. The main reason of the poor behaviour of classical image registration methods is the gap between the amounts of salient points of both images, which is related to the number of points to be considered as outliers. Usually, the difficulty of finding a good match increases when the image that represents the tiny part of the scene has been drastically rotated. Again, in the case of palmprint forensics, it is difficult to decide a priori the orientation of the found tiny palmprint image. We present a rotation invariant registration method that explicitly considers that the image to be matched is a small piece of a larger image. We have experimentally validated our method in two different scenarios; palmprint identification and outdoor image registration.