 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Gaussian Particle Filter Approach for Sensors to Track Multiple Moving Targets
Paper and Code
Jan 11, 2015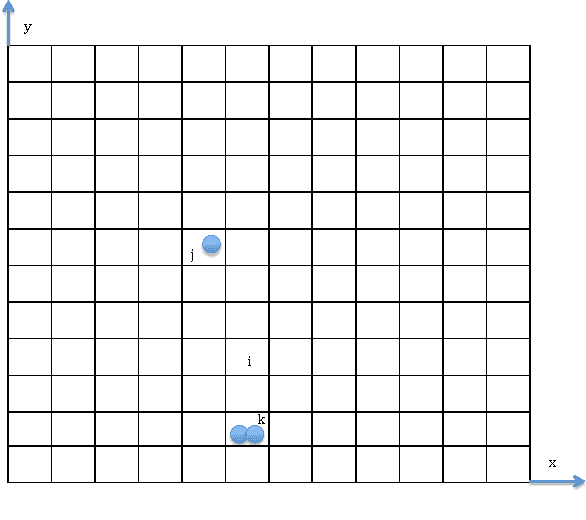
In a variety of problems, the number and state of multiple moving targets are unknown and are subject to be inferred from their measurements obtained by a sensor with limited sensing ability. This type of problems is raised in a variety of applications, including monitoring of endangered species, cleaning, and surveillance. Particle filters are widely used to estimate target state from its prior information and its measurements that recently become available, especially for the cases when the measurement model and the prior distribution of state of interest are non-Gaussian. However, the problem of estimating number of total targets and their state becomes intractable when the number of total targets and the measurement-target association are unknown. This paper presents a novel Gaussian particle filter technique that combines Kalman filter and particle filter for estimating the number and state of total targets based on the measurement obtained online. The estimation is represented by a set of weighted particles, different from classical particle filter, where each particle is a Gaussian distribution instead of a point mass.