 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA fast and robust algorithm to count topologically persistent holes in noisy clouds
Paper and Code
Jul 19, 2014

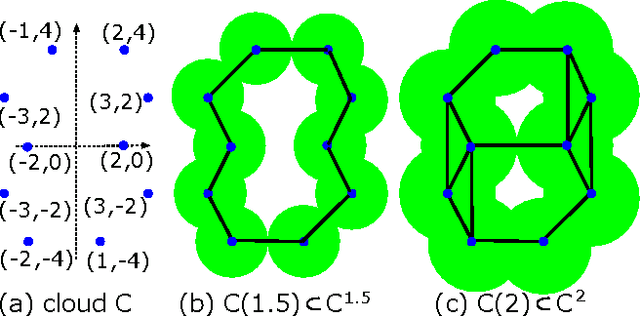

Preprocessing a 2D image often produces a noisy cloud of interest points. We study the problem of counting holes in unorganized clouds in the plane. The holes in a given cloud are quantified by the topological persistence of their boundary contours when the cloud is analyzed at all possible scales. We design the algorithm to count holes that are most persistent in the filtration of offsets (neighborhoods) around given points. The input is a cloud of $n$ points in the plane without any user-defined parameters. The algorithm has $O(n\log n)$ time and $O(n)$ space. The output is the array (number of holes, relative persistence in the filtration). We prove theoretical guarantees when the algorithm finds the correct number of holes (components in the complement) of an unknown shape approximated by a cloud.