 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Factor Graph-based approach to vehicle sideslip angle estimation
Paper and Code
Jul 21, 2021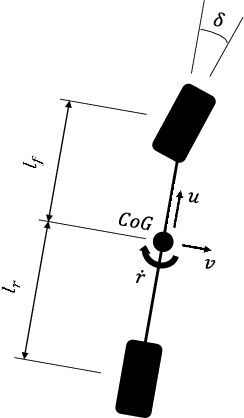
Sideslip angle is an important variable for understanding and monitoring vehicle dynamics but it lacks an inexpensive method for direct measurement. Therefore, it is typically estimated from inertial and other proprioceptive sensors onboard using filtering methods from the family of the Kalman Filter. As a novel alternative, this work proposes modelling the problem directly as a graphical model (factor graph), which can then be optimized using a variety of methods, such as whole dataset batch optimization for offline processing or fixed-lag smoother for on-line operation. Experimental results on real vehicle datasets validate the proposal with a good agreement between estimated and actual sideslip angle, showing similar performance than the state-of-the-art with a great potential for future extensions due to the flexible mathematical framework.