 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Distributed Multi-Robot Framework for Exploration, Information Acquisition and Consensus
Paper and Code
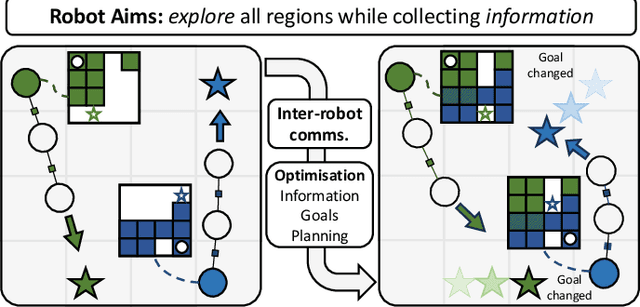
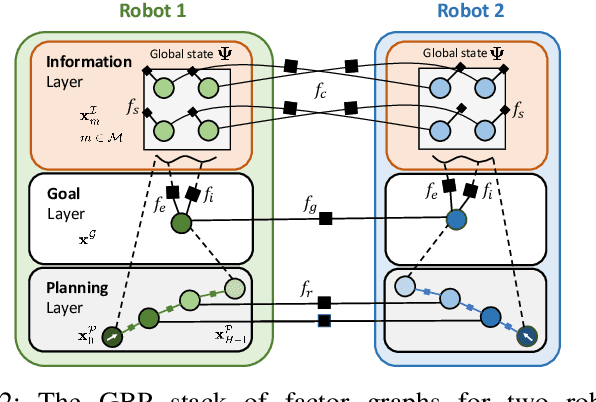
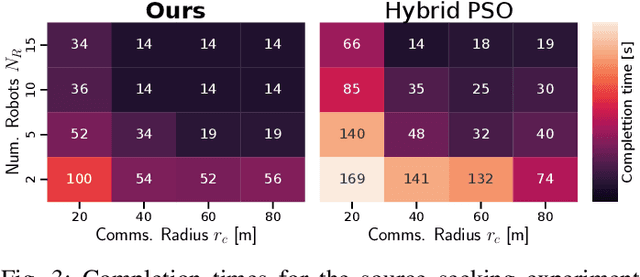
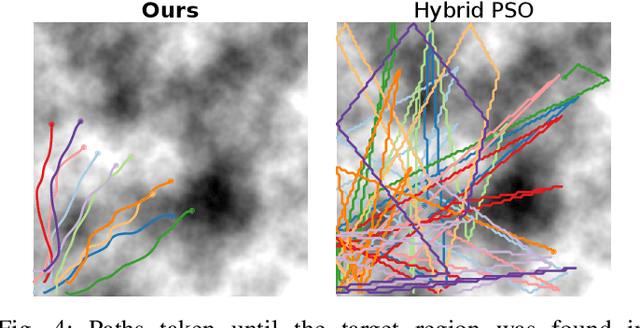
The distributed coordination of robot teams performing complex tasks is challenging to formulate. The different aspects of a complete task such as local planning for obstacle avoidance, global goal coordination and collaborative mapping are often solved separately, when clearly each of these should influence the others for the most efficient behaviour. In this paper we use the example application of distributed information acquisition as a robot team explores a large space to show that we can formulate the whole problem as a single factor graph with multiple connected layers representing each aspect. We use Gaussian Belief Propagation (GBP) as the inference mechanism, which permits parallel, on-demand or asynchronous computation for efficiency when different aspects are more or less important. This is the first time that a distributed GBP multi-robot solver has been proven to enable intelligent collaborative behaviour rather than just guiding robots to individual, selfish goals. We encourage the reader to view our demos at https://aalpatya.github.io/gbpstack