 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Closer Look at Learned Optimization: Stability, Robustness, and Inductive Biases
Paper and Code
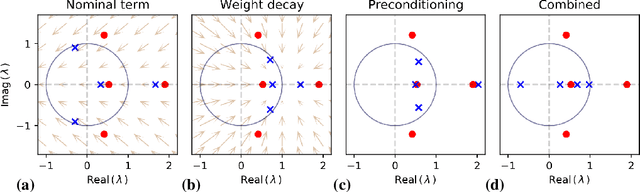
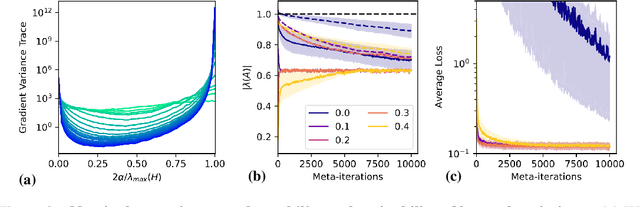
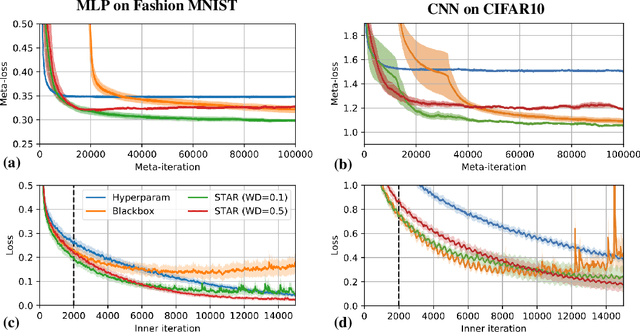
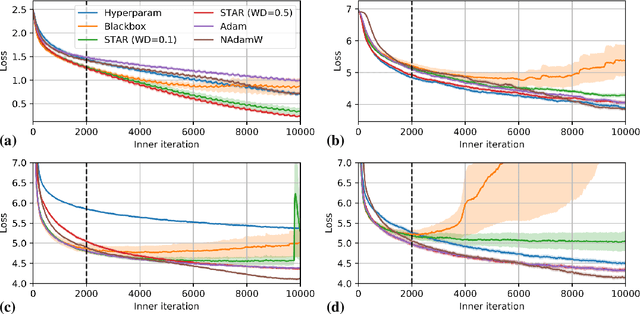
Learned optimizers -- neural networks that are trained to act as optimizers -- have the potential to dramatically accelerate training of machine learning models. However, even when meta-trained across thousands of tasks at huge computational expense, blackbox learned optimizers often struggle with stability and generalization when applied to tasks unlike those in their meta-training set. In this paper, we use tools from dynamical systems to investigate the inductive biases and stability properties of optimization algorithms, and apply the resulting insights to designing inductive biases for blackbox optimizers. Our investigation begins with a noisy quadratic model, where we characterize conditions in which optimization is stable, in terms of eigenvalues of the training dynamics. We then introduce simple modifications to a learned optimizer's architecture and meta-training procedure which lead to improved stability, and improve the optimizer's inductive bias. We apply the resulting learned optimizer to a variety of neural network training tasks, where it outperforms the current state of the art learned optimizer -- at matched optimizer computational overhead -- with regard to optimization performance and meta-training speed, and is capable of generalization to tasks far different from those it was meta-trained on.