 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Causal-based Approach to Explain, Predict and Prevent Failures in Robotic Tasks
Paper and Code
Sep 12, 2022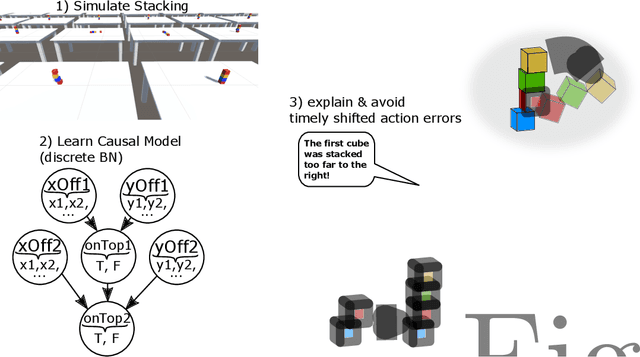

Robots working in real environments need to adapt to unexpected changes to avoid failures. This is an open and complex challenge that requires robots to timely predict and identify the causes of failures to prevent them. In this paper, we present a causal method that will enable robots to predict when errors are likely to occur and prevent them from happening by executing a corrective action. First, we propose a causal-based method to detect the cause-effect relationships between task executions and their consequences by learning a causal Bayesian network (BN). The obtained model is transferred from simulated data to real scenarios to demonstrate the robustness and generalization of the obtained models. Based on the causal BN, the robot can predict if and why the executed action will succeed or not in its current state. Then, we introduce a novel method that finds the closest state alternatives through a contrastive Breadth-First-Search if the current action was predicted to fail. We evaluate our approach for the problem of stacking cubes in two cases; a) single stacks (stacking one cube) and; b) multiple stacks (stacking three cubes). In the single-stack case, our method was able to reduce the error rate by 97%. We also show that our approach can scale to capture multiple actions in one model, allowing to measure timely shifted action effects, such as the impact of an imprecise stack of the first cube on the stacking success of the third cube. For these complex situations, our model was able to prevent around 75% of the stacking errors, even for the challenging multiple-stack scenario. Thus, demonstrating that our method is able to explain, predict, and prevent execution failures, which even scales to complex scenarios that require an understanding of how the action history impacts future actions.