 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Bayesian framework for active object recognition, pose estimation and shape transfer learning through touch
Paper and Code
Sep 10, 2024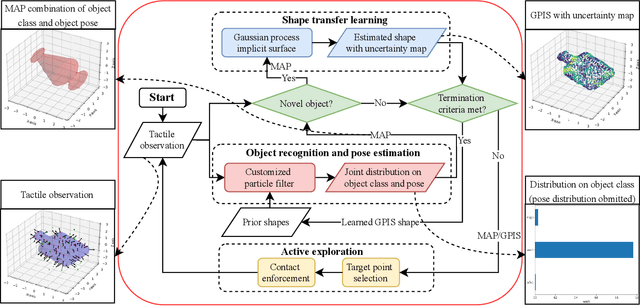
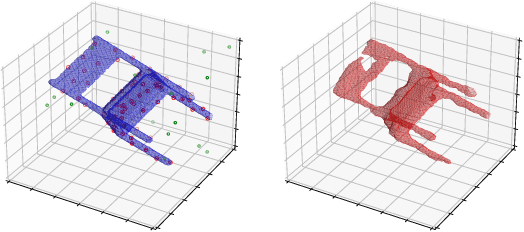
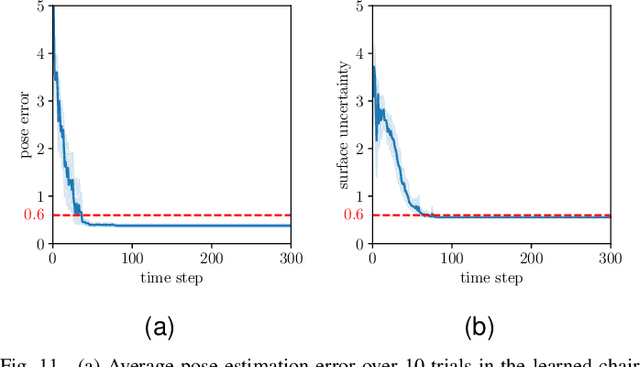
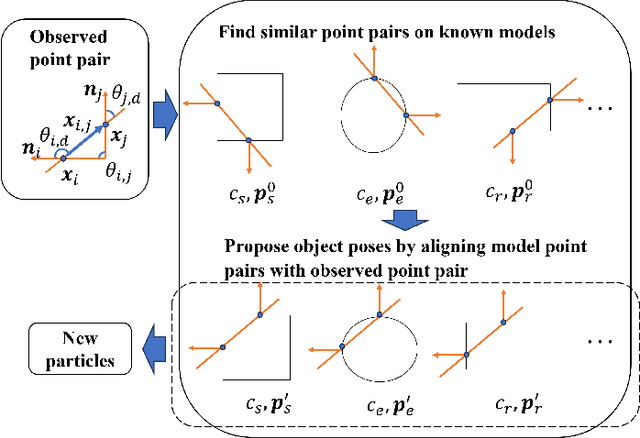
As humans can explore and understand the world through the sense of touch, tactile sensing is also an important aspect of robotic perception. In unstructured environments, robots can encounter both known and novel objects, this calls for a method to address both known and novel objects. In this study, we combine a particle filter (PF) and Gaussian process implicit surface (GPIS) in a unified Bayesian framework. The framework can differentiate between known and novel objects, perform object recognition, estimate pose for known objects, and reconstruct shapes for unknown objects, in an active learning fashion. By grounding the selection of the GPIS prior with the maximum-likelihood-estimation (MLE) shape from the PF, the knowledge about known objects' shapes can be transferred to learn novel shapes. An exploration procedure with global shape estimation is proposed to guide active data acquisition and conclude the exploration when sufficient information is obtained. The performance of the proposed Bayesian framework is evaluated through simulations on known and novel objects, initialized with random poses and is compared with a rapidly explore random tree (RRT).The results show that the proposed exploration procedure, utilizing global shape estimation, achieves faster exploration than the RRT-based local exploration procedure. Overall, results indicate that the proposed framework is effective and efficient in object recognition, pose estimation and shape reconstruction. Moreover, we show that a learned shape can be included as a new prior and used effectively for future object recognition and pose estimation of novel objects.