 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Underactuated Bipedal Walking via H-LIP based Gait Synthesis and Stepping Stabilization
Paper and Code
Feb 05, 2021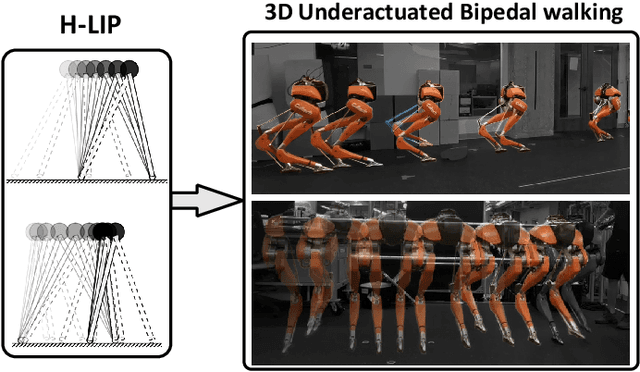
In this paper, we present a Hybrid-Linear Inverted Pendulum (H-LIP) based approach for synthesizing and stabilizing 3D underactuated bipedal walking. The H-LIP model is proposed to capture the essential components of the underactuated part and actuated part of the robotic walking. The walking gait of the robot is then synthesized based on the H-LIP. We comprehensively characterize the periodic orbits of the H-LIP and provably derive their stepping stabilization. The step-to-step (S2S) dynamics of the H-LIP is then utilized to approximate the S2S dynamics of the horizontal state of the center of mass (COM) of the robotic walking, which results in a H-LIP based stepping controller to provide desired step sizes to stabilize the robotic walking. By realizing the desired step sizes, the robot achieves dynamic and stable walking. The approach is evaluated in both simulation and experiment on the 3D underactuated bipedal robot Cassie, which demonstrate dynamic walking behaviors with both versatility and robustness.