Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Camouflaging Object using RGB-D Sensors
Paper and Code
Sep 24, 2017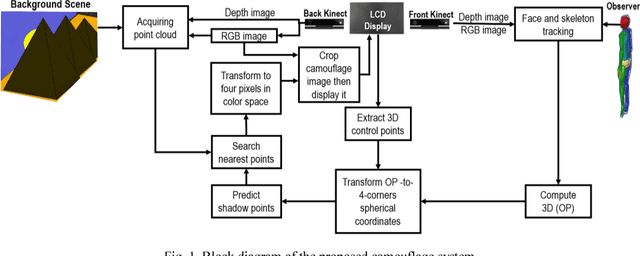
This paper proposes a new optical camouflage system that uses RGB-D cameras, for acquiring point cloud of background scene, and tracking observers eyes. This system enables a user to conceal an object located behind a display that surrounded by 3D objects. If we considered here the tracked point of observer s eyes is a light source, the system will work on estimating shadow shape of the display device that falls on the objects in background. The system uses the 3d observer s eyes and the locations of display corners to predict their shadow points which have nearest neighbors in the constructed point cloud of background scene.
* 6 pages, 12 figures, 2017 IEEE International Conference on SMC
View paper on