 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge2T-UNET: A Two-Tower UNet with Depth Clues for Robust Stereo Depth Estimation
Paper and Code
Oct 27, 2022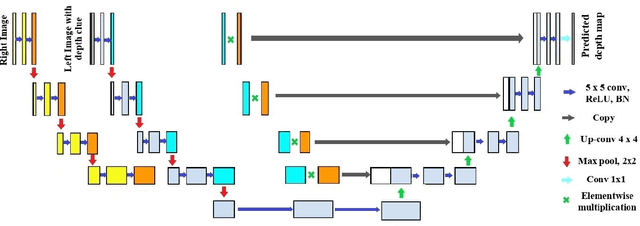
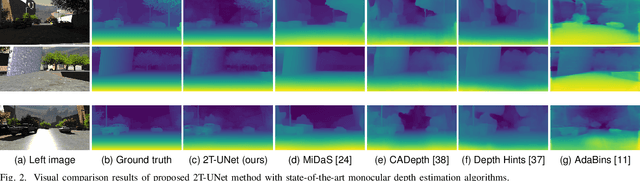
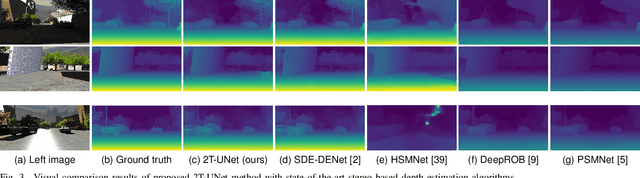
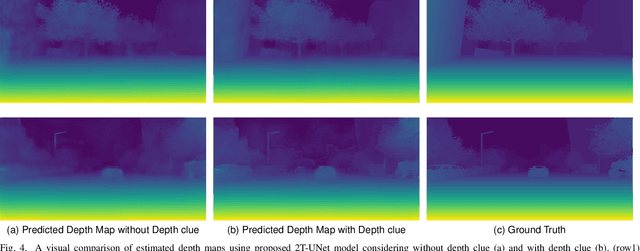
Stereo correspondence matching is an essential part of the multi-step stereo depth estimation process. This paper revisits the depth estimation problem, avoiding the explicit stereo matching step using a simple two-tower convolutional neural network. The proposed algorithm is entitled as 2T-UNet. The idea behind 2T-UNet is to replace cost volume construction with twin convolution towers. These towers have an allowance for different weights between them. Additionally, the input for twin encoders in 2T-UNet are different compared to the existing stereo methods. Generally, a stereo network takes a right and left image pair as input to determine the scene geometry. However, in the 2T-UNet model, the right stereo image is taken as one input and the left stereo image along with its monocular depth clue information, is taken as the other input. Depth clues provide complementary suggestions that help enhance the quality of predicted scene geometry. The 2T-UNet surpasses state-of-the-art monocular and stereo depth estimation methods on the challenging Scene flow dataset, both quantitatively and qualitatively. The architecture performs incredibly well on complex natural scenes, highlighting its usefulness for various real-time applications. Pretrained weights and code will be made readily available.