 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClothTransformer: Unified Latent-Space Transformers for Scalable Cloth Simulation
May 27, 2026Unified and scalable Transformers have recently achieved remarkable success in modeling diverse phenomena traditionally associated with computer graphics, such as 3D visual effects, rendering processes, and motion in videos. In this work, we take a step further by investigating whether modern Transformer techniques can tackle the challenging task of cloth simulation. To this end, we present ClothTransformer, a framework that reformulates cloth simulation as autoregressive sequence modeling in a learned latent space. Existing neural cloth simulators are largely specialized to single scenarios, intrinsically coupled to the mesh discretization, and lack robust collision handling. Our approach addresses these limitations through three contributions: (1) a unified Transformer architecture that handles diverse scenarios -- body-driven garments, robotic manipulation, and free-fall collisions -- under a single model and achieves approximately $4$--$9{\times}$ lower error than prior state-of-the-art methods across all scenarios; (2) a scalable latent-space formulation that compresses arbitrary-resolution meshes into a fixed-size set of latent tokens, making temporal dynamics computation independent of mesh resolution; and (3) a diverse-scenario high-fidelity penetration-free dataset of ${\sim}$493.4k frames spanning all three settings, which enables a differentiable Continuous Collision Detection (CCD) module to suppress penetration artifacts.
Reversible GNS for Dissipative Fluids with Consistent Bidirectional Dynamics
Sep 26, 2025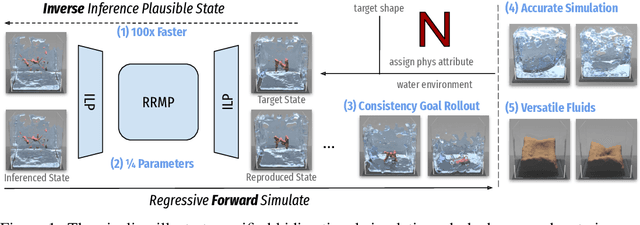

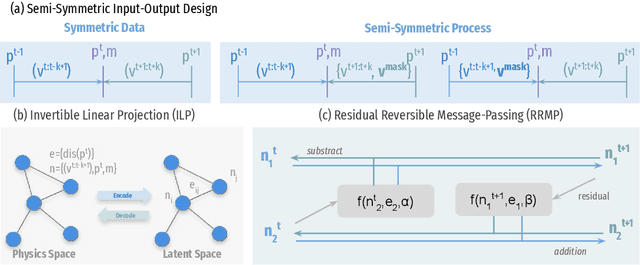

Simulating physically plausible trajectories toward user-defined goals is a fundamental yet challenging task in fluid dynamics. While particle-based simulators can efficiently reproduce forward dynamics, inverse inference remains difficult, especially in dissipative systems where dynamics are irreversible and optimization-based solvers are slow, unstable, and often fail to converge. In this work, we introduce the Reversible Graph Network Simulator (R-GNS), a unified framework that enforces bidirectional consistency within a single graph architecture. Unlike prior neural simulators that approximate inverse dynamics by fitting backward data, R-GNS does not attempt to reverse the underlying physics. Instead, we propose a mathematically invertible design based on residual reversible message passing with shared parameters, coupling forward dynamics with inverse inference to deliver accurate predictions and efficient recovery of plausible initial states. Experiments on three dissipative benchmarks (Water-3D, WaterRamps, and WaterDrop) show that R-GNS achieves higher accuracy and consistency with only one quarter of the parameters, and performs inverse inference more than 100 times faster than optimization-based baselines. For forward simulation, R-GNS matches the speed of strong GNS baselines, while in goal-conditioned tasks it eliminates iterative optimization and achieves orders-of-magnitude speedups. On goal-conditioned tasks, R-GNS further demonstrates its ability to complex target shapes (e.g., characters "L" and "N") through vivid, physically consistent trajectories. To our knowledge, this is the first reversible framework that unifies forward and inverse simulation for dissipative fluid systems.
Comparative Performance of Finetuned ImageNet Pre-trained Models for Electronic Component Classification
Jun 24, 2025Electronic component classification and detection are crucial in manufacturing industries, significantly reducing labor costs and promoting technological and industrial development. Pre-trained models, especially those trained on ImageNet, are highly effective in image classification, allowing researchers to achieve excellent results even with limited data. This paper compares the performance of twelve ImageNet pre-trained models in classifying electronic components. Our findings show that all models tested delivered respectable accuracies. MobileNet-V2 recorded the highest at 99.95%, while EfficientNet-B0 had the lowest at 92.26%. These results underscore the substantial benefits of using ImageNet pre-trained models in image classification tasks and confirm the practical applicability of these methods in the electronics manufacturing sector.
Learning 3D Garment Animation from Trajectories of A Piece of Cloth
Jan 02, 2025



Garment animation is ubiquitous in various applications, such as virtual reality, gaming, and film producing. Recently, learning-based approaches obtain compelling performance in animating diverse garments under versatile scenarios. Nevertheless, to mimic the deformations of the observed garments, data-driven methods require large scale of garment data, which are both resource-wise expensive and time-consuming. In addition, forcing models to match the dynamics of observed garment animation may hinder the potentials to generalize to unseen cases. In this paper, instead of using garment-wise supervised-learning we adopt a disentangled scheme to learn how to animate observed garments: 1). learning constitutive behaviors from the observed cloth; 2). dynamically animate various garments constrained by the learned constitutive laws. Specifically, we propose Energy Unit network (EUNet) to model the constitutive relations in the format of energy. Without the priors from analytical physics models and differentiable simulation engines, EUNet is able to directly capture the constitutive behaviors from the observed piece of cloth and uniformly describes the change of energy caused by deformations, such as stretching and bending. We further apply the pre-trained EUNet to animate various garments based on energy optimizations. The disentangled scheme alleviates the need of garment data and enables us to utilize the dynamics of a piece of cloth for animating garments. Experiments show that while EUNet effectively delivers the energy gradients due to the deformations, models constrained by EUNet achieve more stable and physically plausible performance comparing with those trained in garment-wise supervised manner. Code is available at https://github.com/ftbabi/EUNet_NeurIPS2024.git .
GauSim: Registering Elastic Objects into Digital World by Gaussian Simulator
Dec 23, 2024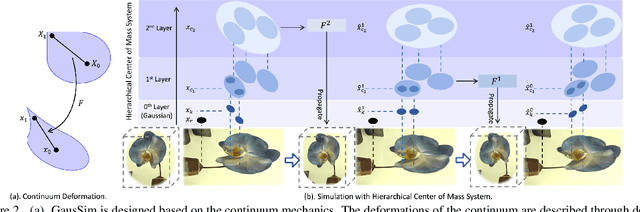
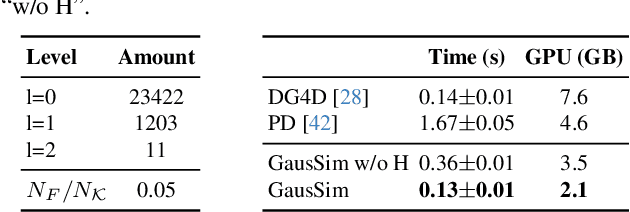
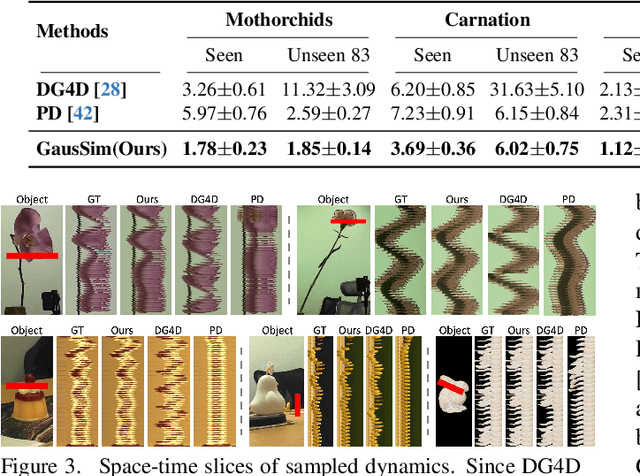
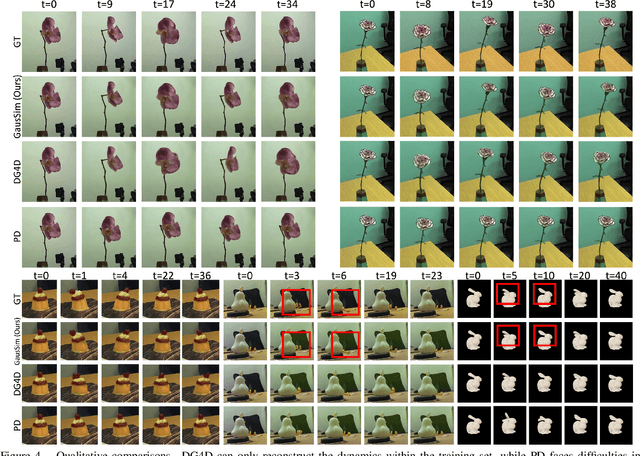
In this work, we introduce GauSim, a novel neural network-based simulator designed to capture the dynamic behaviors of real-world elastic objects represented through Gaussian kernels. Unlike traditional methods that treat kernels as particles within particle-based simulations, we leverage continuum mechanics, modeling each kernel as a continuous piece of matter to account for realistic deformations without idealized assumptions. To improve computational efficiency and fidelity, we employ a hierarchical structure that organizes kernels into Center of Mass Systems (CMS) with explicit formulations, enabling a coarse-to-fine simulation approach. This structure significantly reduces computational overhead while preserving detailed dynamics. In addition, GauSim incorporates explicit physics constraints, such as mass and momentum conservation, ensuring interpretable results and robust, physically plausible simulations. To validate our approach, we present a new dataset, READY, containing multi-view videos of real-world elastic deformations. Experimental results demonstrate that GauSim achieves superior performance compared to existing physics-driven baselines, offering a practical and accurate solution for simulating complex dynamic behaviors. Code and model will be released. Project page: https://www.mmlab-ntu.com/project/gausim/index.html .
Towards Multi-Layered 3D Garments Animation
May 17, 2023



Mimicking realistic dynamics in 3D garment animations is a challenging task due to the complex nature of multi-layered garments and the variety of outer forces involved. Existing approaches mostly focus on single-layered garments driven by only human bodies and struggle to handle general scenarios. In this paper, we propose a novel data-driven method, called LayersNet, to model garment-level animations as particle-wise interactions in a micro physics system. We improve simulation efficiency by representing garments as patch-level particles in a two-level structural hierarchy. Moreover, we introduce a novel Rotation Equivalent Transformation that leverages the rotation invariance and additivity of physics systems to better model outer forces. To verify the effectiveness of our approach and bridge the gap between experimental environments and real-world scenarios, we introduce a new challenging dataset, D-LAYERS, containing 700K frames of dynamics of 4,900 different combinations of multi-layered garments driven by both human bodies and randomly sampled wind. Our experiments show that LayersNet achieves superior performance both quantitatively and qualitatively. We will make the dataset and code publicly available at https://mmlab-ntu.github.io/project/layersnet/index.html .
Transformer with Implicit Edges for Particle-based Physics Simulation
Jul 22, 2022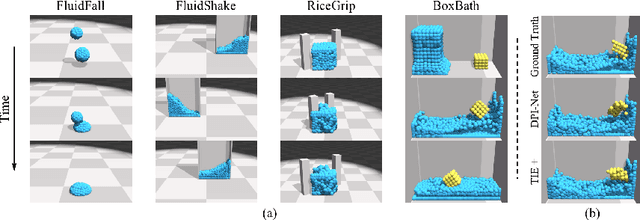
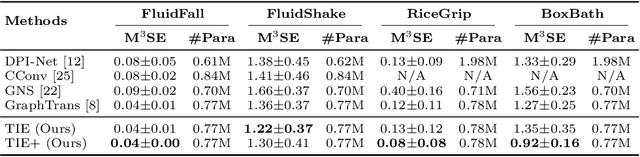
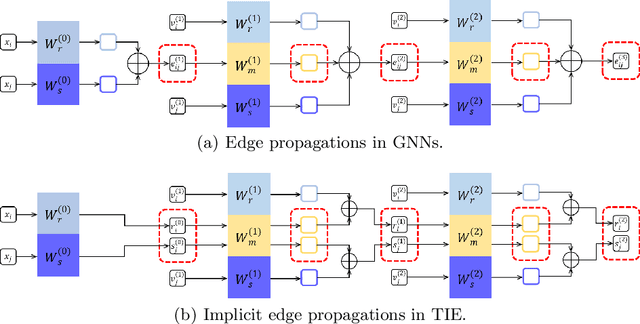
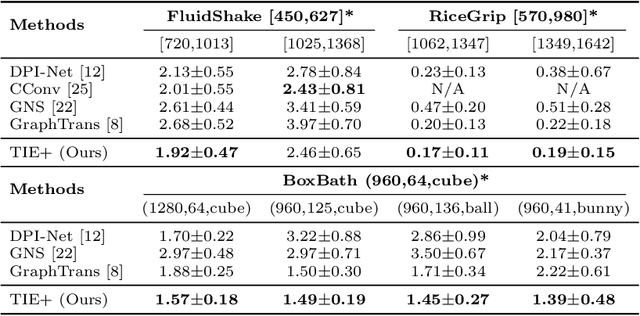
Particle-based systems provide a flexible and unified way to simulate physics systems with complex dynamics. Most existing data-driven simulators for particle-based systems adopt graph neural networks (GNNs) as their network backbones, as particles and their interactions can be naturally represented by graph nodes and graph edges. However, while particle-based systems usually contain hundreds even thousands of particles, the explicit modeling of particle interactions as graph edges inevitably leads to a significant computational overhead, due to the increased number of particle interactions. Consequently, in this paper we propose a novel Transformer-based method, dubbed as Transformer with Implicit Edges (TIE), to capture the rich semantics of particle interactions in an edge-free manner. The core idea of TIE is to decentralize the computation involving pair-wise particle interactions into per-particle updates. This is achieved by adjusting the self-attention module to resemble the update formula of graph edges in GNN. To improve the generalization ability of TIE, we further amend TIE with learnable material-specific abstract particles to disentangle global material-wise semantics from local particle-wise semantics. We evaluate our model on diverse domains of varying complexity and materials. Compared with existing GNN-based methods, without bells and whistles, TIE achieves superior performance and generalization across all these domains. Codes and models are available at https://github.com/ftbabi/TIE_ECCV2022.git.