 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTimeCapsule: Solving the Jigsaw Puzzle of Long-Term Time Series Forecasting with Compressed Predictive Representations
Apr 17, 2025Recent deep learning models for Long-term Time Series Forecasting (LTSF) often emphasize complex, handcrafted designs, while simpler architectures like linear models or MLPs have often outperformed these intricate solutions. In this paper, we revisit and organize the core ideas behind several key techniques, such as redundancy reduction and multi-scale modeling, which are frequently employed in advanced LTSF models. Our goal is to streamline these ideas for more efficient deep learning utilization. To this end, we introduce TimeCapsule, a model built around the principle of high-dimensional information compression that unifies these techniques in a generalized yet simplified framework. Specifically, we model time series as a 3D tensor, incorporating temporal, variate, and level dimensions, and leverage mode production to capture multi-mode dependencies while achieving dimensionality compression. We propose an internal forecast within the compressed representation domain, supported by the Joint-Embedding Predictive Architecture (JEPA), to monitor the learning of predictive representations. Extensive experiments on challenging benchmarks demonstrate the versatility of our method, showing that TimeCapsule can achieve state-of-the-art performance.
MNT-TNN: Spatiotemporal Traffic Data Imputation via Compact Multimode Nonlinear Transform-based Tensor Nuclear Norm
Mar 29, 2025Imputation of random or non-random missing data is a long-standing research topic and a crucial application for Intelligent Transportation Systems (ITS). However, with the advent of modern communication technologies such as Global Satellite Navigation Systems (GNSS), traffic data collection has outpaced traditional methods, introducing new challenges in random missing value imputation and increasing demands for spatiotemporal dependency modelings. To address these issues, we propose a novel spatiotemporal traffic imputation method, Multimode Nonlinear Transformed Tensor Nuclear Norm (MNT-TNN), grounded in the Transform-based Tensor Nuclear Norm (TTNN) optimization framework which exhibits efficient mathematical representations and theoretical guarantees for the recovery of random missing values. Specifically, we strictly extend the single-mode transform in TTNN to a multimode transform with nonlinear activation, effectively capturing the intrinsic multimode spatiotemporal correlations and low-rankness of the traffic tensor, represented as location $\times$ location $\times$ time. To solve the nonconvex optimization problem, we design a proximal alternating minimization (PAM) algorithm with theoretical convergence guarantees. We suggest an Augmented Transform-based Tensor Nuclear Norm Families (ATTNNs) framework to enhance the imputation results of TTNN techniques, especially at very high miss rates. Extensive experiments on real datasets demonstrate that our proposed MNT-TNN and ATTNNs can outperform the compared state-of-the-art imputation methods, completing the benchmark of random missing traffic value imputation.
PROB-SLAM: Real-time Visual SLAM Based on Probabilistic Graph Optimization
Sep 15, 2022

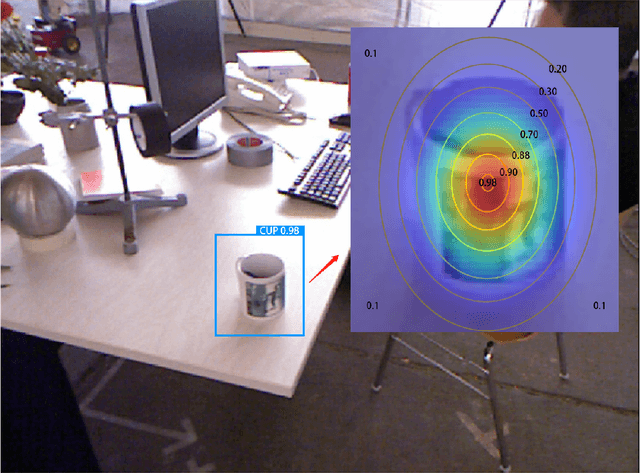
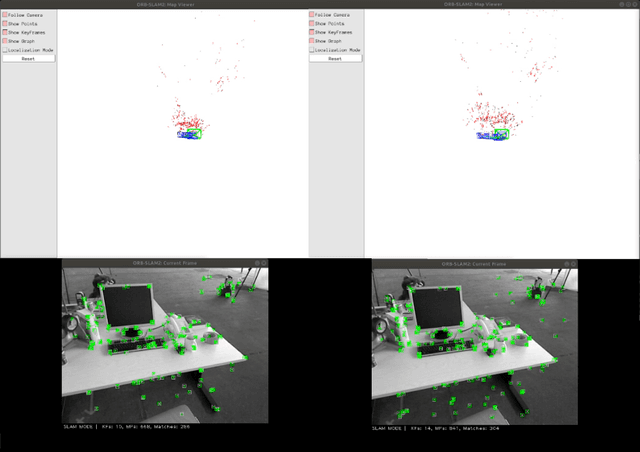
Traditional SLAM algorithms are typically based on artificial features, which lack high-level information. By introducing semantic information, SLAM can own higher stability and robustness rather than purely hand-crafted features. However, the high uncertainty of semantic detection networks prohibits the practical functionality of high-level information. To solve the uncertainty property introduced by semantics, this paper proposed a novel probability map based on the Gaussian distribution assumption. This map transforms the semantic binary object detection into probability results, which help establish a probabilistic data association between artificial features and semantic info. Through our algorithm, the higher confidence will be given higher weights in each update step while the edge of the detection area will be endowed with lower confidence. Then the uncertainty is undermined and has less effect on nonlinear optimization. The experiments are carried out in the TUM RGBD dataset, results show that our system improves ORB-SLAM2 by about 15% in indoor environments' errors. We have demonstrated that the method can be successfully applied to environments containing dynamic objects.