 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenDR: An Open Toolkit for Enabling High Performance, Low Footprint Deep Learning for Robotics
Mar 01, 2022



Existing Deep Learning (DL) frameworks typically do not provide ready-to-use solutions for robotics, where very specific learning, reasoning, and embodiment problems exist. Their relatively steep learning curve and the different methodologies employed by DL compared to traditional approaches, along with the high complexity of DL models, which often leads to the need of employing specialized hardware accelerators, further increase the effort and cost needed to employ DL models in robotics. Also, most of the existing DL methods follow a static inference paradigm, as inherited by the traditional computer vision pipelines, ignoring active perception, which can be employed to actively interact with the environment in order to increase perception accuracy. In this paper, we present the Open Deep Learning Toolkit for Robotics (OpenDR). OpenDR aims at developing an open, non-proprietary, efficient, and modular toolkit that can be easily used by robotics companies and research institutions to efficiently develop and deploy AI and cognition technologies to robotics applications, providing a solid step towards addressing the aforementioned challenges. We also detail the design choices, along with an abstract interface that was created to overcome these challenges. This interface can describe various robotic tasks, spanning beyond traditional DL cognition and inference, as known by existing frameworks, incorporating openness, homogeneity and robotics-oriented perception e.g., through active perception, as its core design principles.
Markov Localization for Mobile Robots in Dynamic Environments
Jun 01, 2011
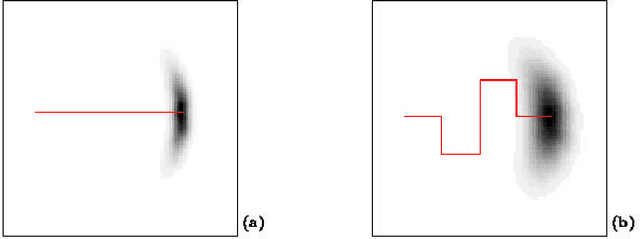

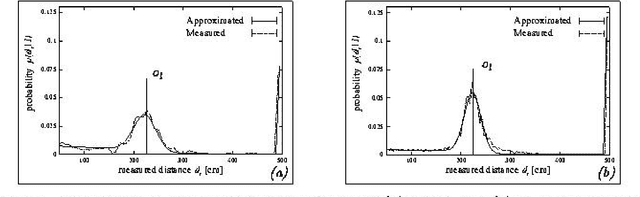
Localization, that is the estimation of a robot's location from sensor data, is a fundamental problem in mobile robotics. This papers presents a version of Markov localization which provides accurate position estimates and which is tailored towards dynamic environments. The key idea of Markov localization is to maintain a probability density over the space of all locations of a robot in its environment. Our approach represents this space metrically, using a fine-grained grid to approximate densities. It is able to globally localize the robot from scratch and to recover from localization failures. It is robust to approximate models of the environment (such as occupancy grid maps) and noisy sensors (such as ultrasound sensors). Our approach also includes a filtering technique which allows a mobile robot to reliably estimate its position even in densely populated environments in which crowds of people block the robot's sensors for extended periods of time. The method described here has been implemented and tested in several real-world applications of mobile robots, including the deployments of two mobile robots as interactive museum tour-guides.