 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulation-based Analysis of a Novel Loop-based Road Topology for Autonomous Vehicles
Feb 03, 2024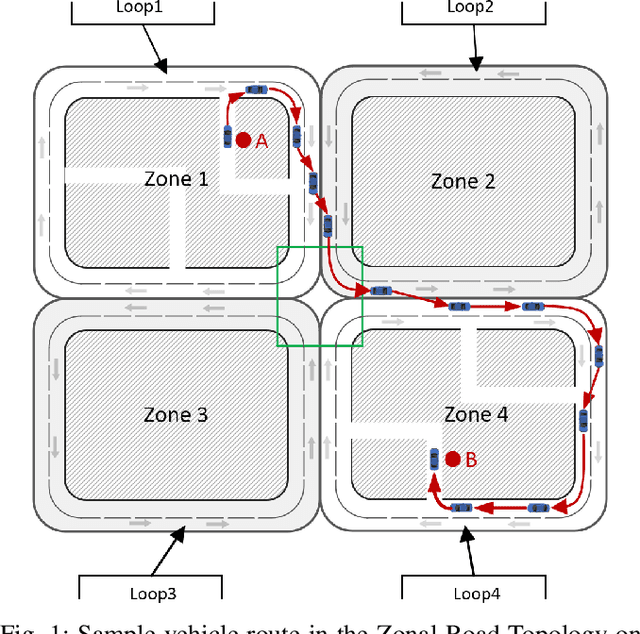
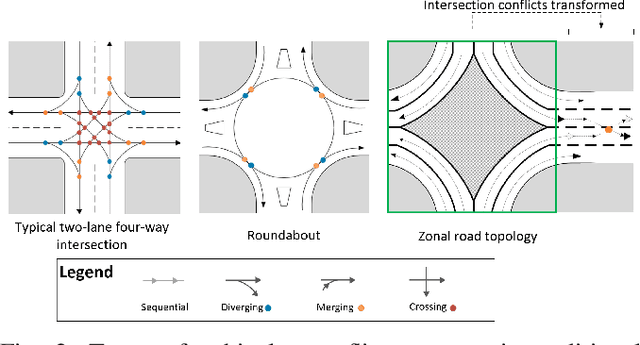
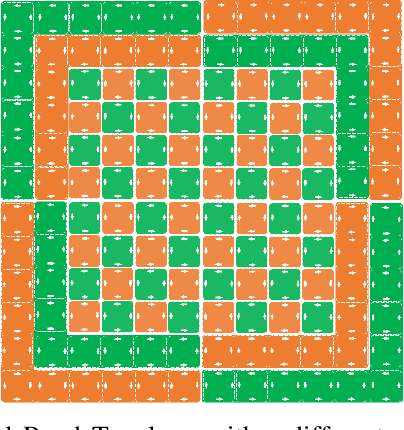
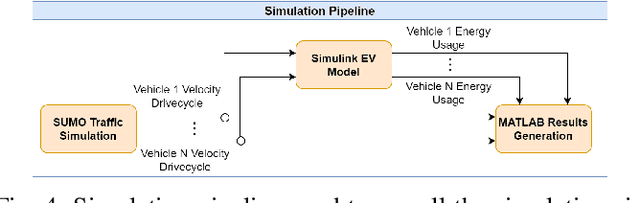
The challenges in implementing SAE Level 4/5 autonomous vehicles are manifold, with intersection navigation being a pervasive one. We analyze a novel road topology invented by a co-author of this paper, Xiayong Hu. The topology eliminates the need for traditional traffic control and cross-traffic at intersections, potentially improving the safety of autonomous driving systems. The topology, herein called the Zonal Road Topology, consists of unidirectional loops of road with traffic flowing either clockwise or counter-clockwise. Adjacent loops are directionally aligned with one another, allowing vehicles to transfer from one loop to another through a simple lane change. To evaluate the Zonal Road Topology, a one km2 pilot-track near Changshu, China is currently being set aside for testing. In parallel, traffic simulations are being performed. To this end, we conduct a simulation-based comparison between the Zonal Road Topology and a traditional road topology for a generic Electric Vehicle (EV) using the Simulation for Urban MObility (SUMO) platform and MATLAB/Simulink. We analyze the topologies in terms of their travel efficiency, safety, energy usage, and capacity. Drive time, number of halts, progress rate, and other metrics are analyzed across varied traffic levels to investigate the advantages and disadvantages of the Zonal Road Topology. Our results indicate that vehicles on the Zonal Road Topology have a lower, more consistent drive time with greater traffic throughput, while using less energy on average. These results become more prominent at higher traffic densities.