 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFair Throughput Optimization with a Dynamic Network of Drone Relays
Jul 11, 2022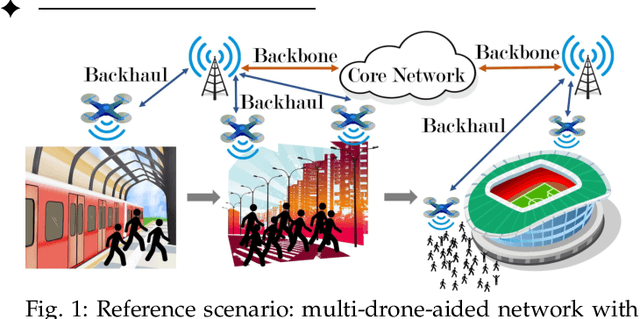
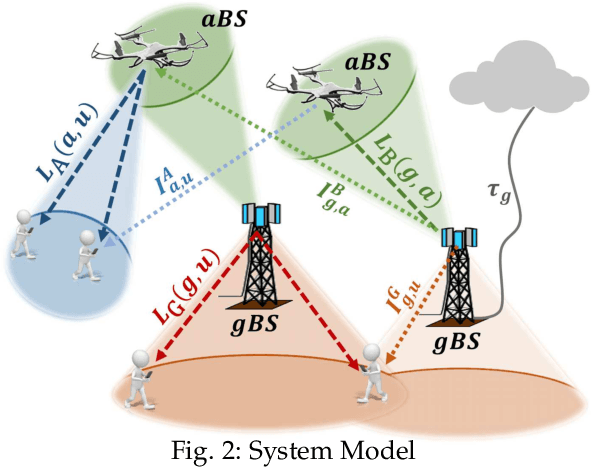
Aiding the ground cellular network with aerial base stations carried by drones has experienced an intensive raise of interest in the past years. Reconfigurable air-to-ground channels enable aerial stations to enhance users access links by means of seeking good line-of-sight connectivity while hovering in the air. In this paper, we propose an analytical framework for the 3D placement of a fleet of coordinated drone relays. This framework optimizes network performance in terms of user throughput fairness, expressed through the {\alpha}-fairness metric. The optimization problem is formulated as a mixed-integer non-convex program, which is intractable. Hence, we propose an extremal-optimization-based algorithm, Parallelized Alpha-fair Drone Deployment, that solves the problem online, in low-degree polynomial time. We evaluate our proposal by means of numerical simulations over the real topology of a dense city. We discuss the advantages of integrating drone relay stations in current networks and test several resource scheduling approaches in both static and dynamic scenarios, including with progressively larger and denser crowds.
Optimizing UAV Recharge Scheduling for Heterogeneous and Persistent Aerial Service
May 25, 2022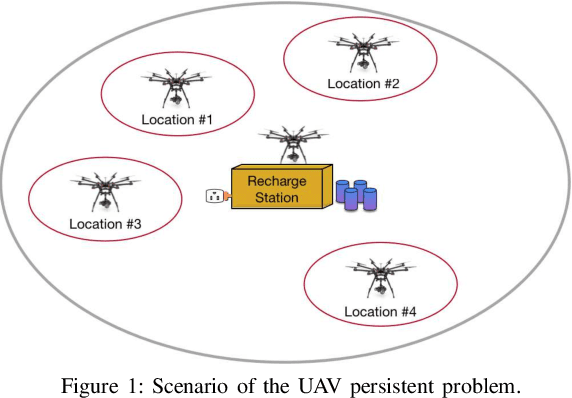
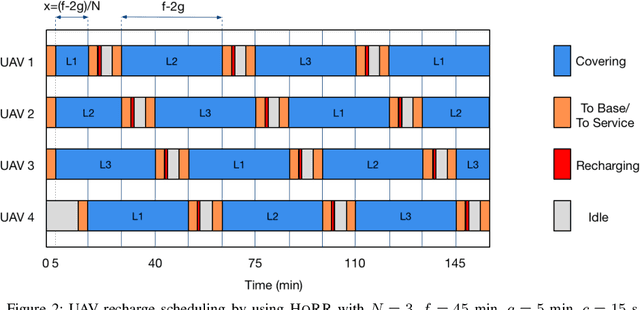
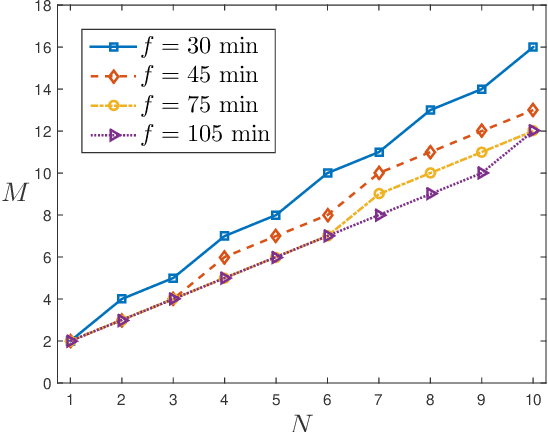

The adoption of UAVs in communication networks is becoming reality thanks to the deployment of advanced solutions for connecting UAVs and using them as communication relays. However, the use of UAVs introduces novel energy constraints and scheduling challenges in the dynamic management of network devices, due to the need to call back and recharge, or substitute, UAVs that run out of energy. In this paper, we design UAV recharging schemes under realistic assumptions on limited flight times and time consuming charging operations. Such schemes are designed to minimize the size of the fleet to be devoted to a persistent service of a set of aerial locations, hence its cost. We consider a fleet of homogeneous UAVs both under homogeneous and heterogeneous service topologies. For UAVs serving aerial locations with homogeneous distances to a recharge station, we design a simple scheduling, that we name HORR, which we prove to be feasible and optimal, in the sense that it uses the minimum possible number of UAVs to guarantee the coverage of the aerial service locations. For the case of non-evenly distributed aerial locations, we demonstrate that the problem becomes NP-hard, and design a lightweight recharging scheduling scheme, PHERR, that extends the operation of HORR to the heterogeneous case, leveraging the partitioning of the set of service locations. We show that PHERR is near-optimal because it approaches the performance limits identified through a lower bound that we formulate on the total fleet size.