 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDirect and Indirect Communication in Multi-Human Multi-Robot Interaction
Feb 01, 2021



How can multiple humans interact with multiple robots? The goal of our research is to create an effective interface that allows multiple operators to collaboratively control teams of robots in complex tasks. In this paper, we focus on a key aspect that affects our exploration of the design space of human-robot interfaces -- inter-human communication. More specifically, we study the impact of direct and indirect communication on several metrics, such as awareness, workload, trust, and interface usability. In our experiments, the participants can engage directly through verbal communication, or indirectly by representing their actions and intentions through our interface. We report the results of a user study based on a collective transport task involving 18 human subjects and 9 robots. Our study suggests that combining both direct and indirect communication is the best approach for effective multi-human / multi-robot interaction.
Transparency in Multi-Human Multi-Robot Interaction
Jan 26, 2021
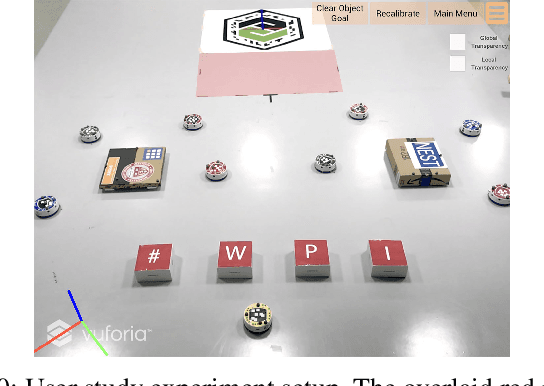

Transparency is a key factor in improving the performance of human-robot interaction. A transparent interface allows humans to be aware of the state of a robot and to assess the progress of the tasks at hand. When multi-robot systems are involved, transparency is an even greater challenge, due to the larger number of variables affecting the behavior of the robots as a whole. Significant effort has been devoted to studying transparency when single operators interact with multiple robots. However, studies on transparency that focus on multiple human operators interacting with a multi-robot systems are limited. This paper aims to fill this gap by presenting a human-swarm interaction interface with graphical elements that can be enabled and disabled. Through this interface, we study which graphical elements are contribute to transparency by comparing four "transparency modes": (i) no transparency (no operator receives information from the robots), (ii) central transparency (the operators receive information only relevant to their personal task), (iii) peripheral transparency (the operators share information on each others' tasks), and (iv) mixed transparency (both central and peripheral). We report the results in terms of awareness, trust, and workload of a user study involving 18 participants engaged in a complex multi-robot task.