 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAddressing the Selection Bias in Voice Assistance: Training Voice Assistance Model in Python with Equal Data Selection
Dec 20, 2022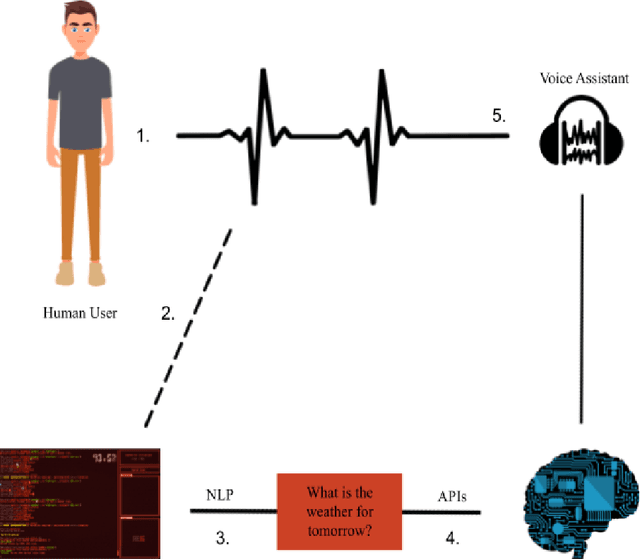

In recent times, voice assistants have become a part of our day-to-day lives, allowing information retrieval by voice synthesis, voice recognition, and natural language processing. These voice assistants can be found in many modern-day devices such as Apple, Amazon, Google, and Samsung. This project is primarily focused on Virtual Assistance in Natural Language Processing. Natural Language Processing is a form of AI that helps machines understand people and create feedback loops. This project will use deep learning to create a Voice Recognizer and use Commonvoice and data collected from the local community for model training using Google Colaboratory. After recognizing a command, the AI assistant will be able to perform the most suitable actions and then give a response. The motivation for this project comes from the race and gender bias that exists in many virtual assistants. The computer industry is primarily dominated by the male gender, and because of this, many of the products produced do not regard women. This bias has an impact on natural language processing. This project will be utilizing various open-source projects to implement machine learning algorithms and train the assistant algorithm to recognize different types of voices, accents, and dialects. Through this project, the goal to use voice data from underrepresented groups to build a voice assistant that can recognize voices regardless of gender, race, or accent. Increasing the representation of women in the computer industry is important for the future of the industry. By representing women in the initial study of voice assistants, it can be shown that females play a vital role in the development of this technology. In line with related work, this project will use first-hand data from the college population and middle-aged adults to train voice assistant to combat gender bias.
Multi-modal data fusion of Voice and EMG data for Robotic Control
Jan 06, 2022


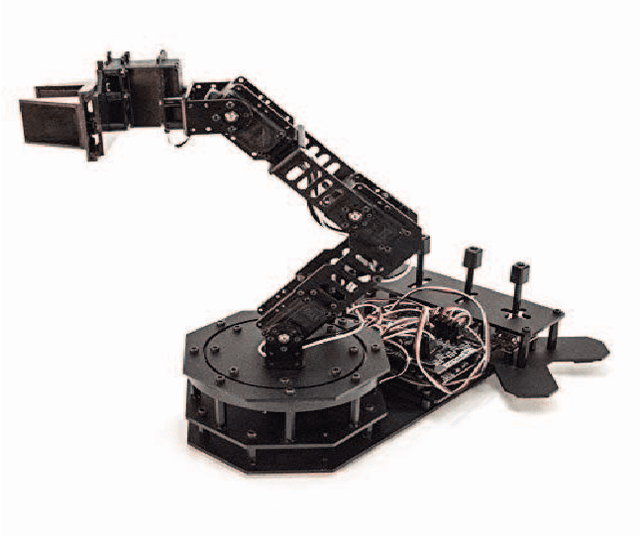
Wearable electronic equipment is constantly evolving and is increasing the integration of humans with technology. Available in various forms, these flexible and bendable devices sense and can measure the physiological and muscular changes in the human body and may use those signals to machine control. The MYO gesture band, one such device, captures Electromyography data (EMG) using myoelectric signals and translates them to be used as input signals through some predefined gestures. Use of this device in a multi-modal environment will not only increase the possible types of work that can be accomplished with the help of such device, but it will also help in improving the accuracy of the tasks performed. This paper addresses the fusion of input modalities such as speech and myoelectric signals captured through a microphone and MYO band, respectively, to control a robotic arm. Experimental results obtained as well as their accuracies for performance analysis are also presented.