 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized traffic management of autonomous drones
Dec 18, 2023Coordination of local and global aerial traffic has become a legal and technological bottleneck as the number of unmanned vehicles in the common airspace continues to grow. To meet this challenge, automation and decentralization of control is an unavoidable requirement. In this paper, we present a solution that enables self-organization of cooperating autonomous agents into an effective traffic flow state in which the common aerial coordination task - filled with conflicts - is resolved. Using realistic simulations, we show that our algorithm is safe, efficient, and scalable regarding the number of drones and their speed range, while it can also handle heterogeneous agents and even pairwise priorities between them. The algorithm works in any sparse or dense traffic scenario in two dimensions and can be made increasingly efficient by a layered flight space structure in three dimensions. To support the feasibility of our solution, we experimentally demonstrate coordinated aerial traffic of 100 autonomous drones within a circular area with a radius of 125 meters.
Outdoor flocking and formation flight with autonomous aerial robots
Jul 04, 2014

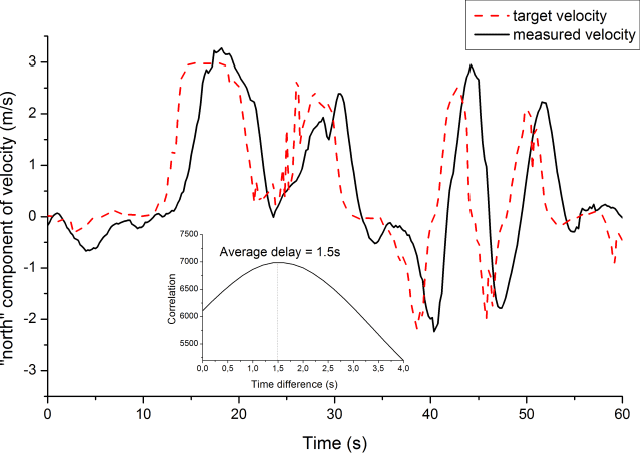

We present the first decentralized multi-copter flock that performs stable autonomous outdoor flight with up to 10 flying agents. By decentralized and autonomous we mean that all members navigate themselves based on the dynamic information received from other robots in the vicinity. We do not use central data processing or control; instead, all the necessary computations are carried out by miniature on-board computers. The only global information the system exploits is from GPS receivers, while the units use wireless modules to share this positional information with other flock members locally. Collective behavior is based on a decentralized control framework with bio-inspiration from statistical physical modelling of animal swarms. In addition, the model is optimized for stable group flight even in a noisy, windy, delayed and error-prone environment. Using this framework we successfully implemented several fundamental collective flight tasks with up to 10 units: i) we achieved self-propelled flocking in a bounded area with self-organized object avoidance capabilities and ii) performed collective target tracking with stable formation flights (grid, rotating ring, straight line). With realistic numerical simulations we demonstrated that the local broadcast-type communication and the decentralized autonomous control method allows for the scalability of the model for much larger flocks.