 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoad Detection in Snowy Forest Environment using RGB Camera
Dec 16, 2022



Automated driving technology has gained a lot of momentum in the last few years. For the exploration field, navigation is the important key for autonomous operation. In difficult scenarios such as snowy environment, the road is covered with snow and road detection is impossible in this situation using only basic techniques. This paper introduces detection of snowy road in forest environment using RGB camera. The method combines noise filtering technique with morphological operation to classify the image component. By using the assumption that all road is covered by snow and the snow part is defined as road area. From the perspective image of road, the vanishing point of road is one of factor to scope the region of road. This vanishing point is found with fitting triangle technique. The performance of algorithm is evaluated by two error value: False Negative Rate and False Positive Rate. The error shows that the method has high efficiency for detect road with straight road but low performance for curved road. This road region will be applied with depth information from camera to detect for obstacle in the future work.
* 5 pages, 9 figures, conference proceeding
Applying Semantic Segmentation to Autonomous Cars in the Snowy Environment
Jul 25, 2020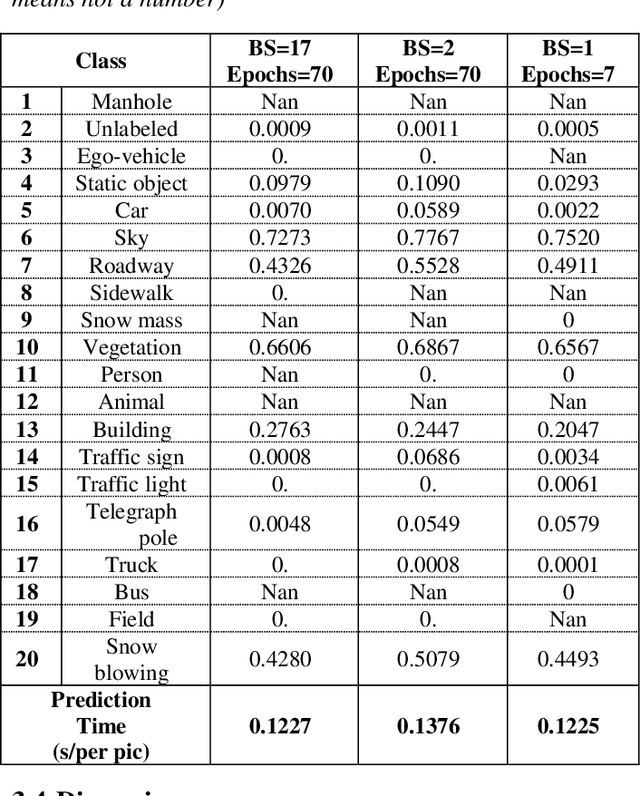
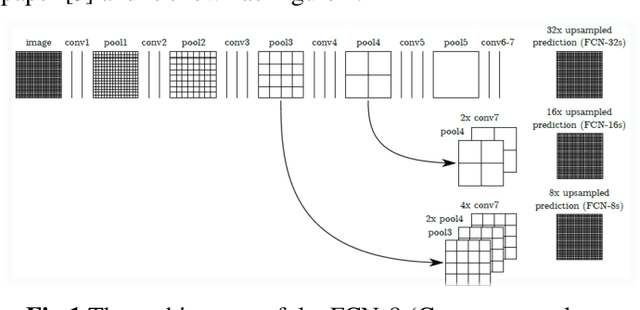
This paper mainly focuses on environment perception in snowy situations which forms the backbone of the autonomous driving technology. For the purpose, semantic segmentation is employed to classify the objects while the vehicle is driven autonomously. We train the Fully Convolutional Networks (FCN) on our own dataset and present the experimental results. Finally, the outcomes are analyzed to give a conclusion. It can be concluded that the database still needs to be optimized and a favorable algorithm should be proposed to get better results.
* 4 pages, 5 Figures