 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpectrum Sharing for Secrecy Performance Enhancement in D2D-enabled UAV Networks
Jan 05, 2022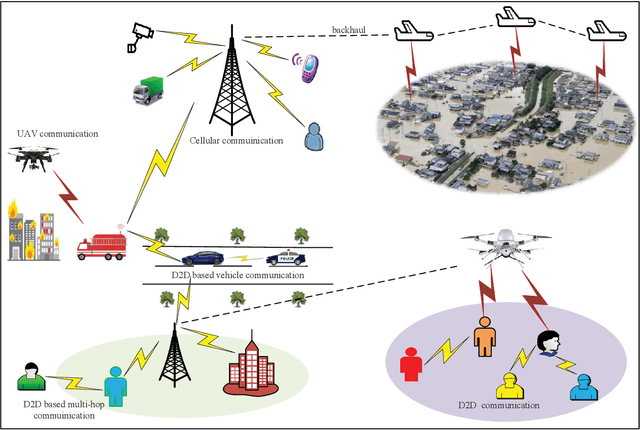
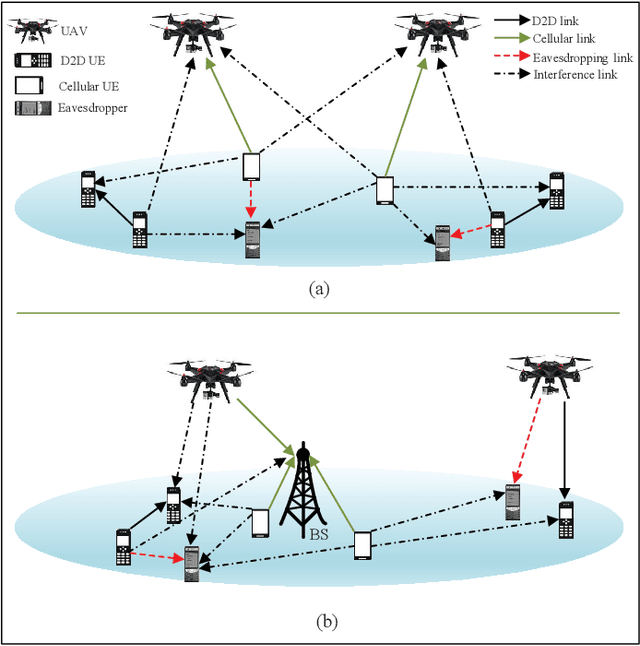
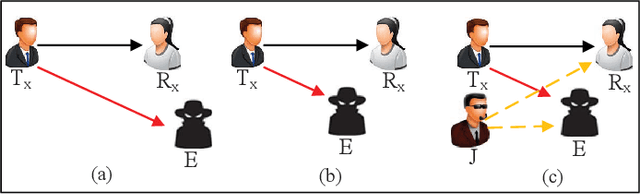
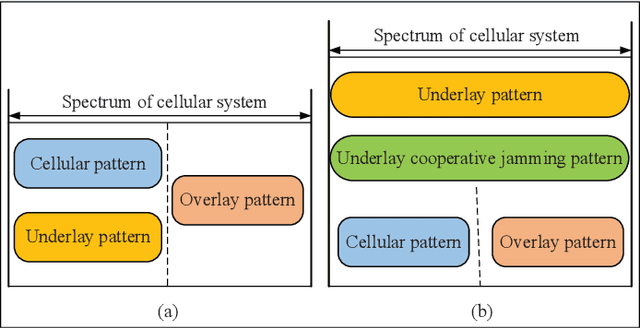
With the assistance of device-to-device (D2D) communications, unmanned aerial vehicle (UAV) networks are anticipated to support widespread applications in the fifth generation (5G) and beyond wireless systems, by providing seamless coverage, flexible deployment, and high channel rate. However, the networks face significant security threats from malicious eavesdroppers due to the inherent broadcast and openness nature of wireless channels. To ensure secure communications of such networks, physical layer security is a promising technique, which utilizes the randomness and noise of wireless channels to enhance secrecy performance. This article investigates physical layer security performance via spectrum sharing in D2D-enabled UAV networks. We first present two typical network architectures where each UAV serves as either a flying base station or an aerial user equipment. Then, we propose a spectrum sharing strategy to fully exploit interference incurred by spectrum reuse for improving secrecy performance. We further conduct two case studies to evaluate the spectrum sharing strategy in these two typical network architectures, and also show secrecy performance gains compared to traditional spectrum sharing strategy. Finally, we discuss some future research directions in D2D-enabled UAV networks.
Energy and Delay aware Physical Collision Avoidance in Unmanned Aerial Vehicles
Jan 05, 2022



Several solutions have been proposed in the literature to address the Unmanned Aerial Vehicles (UAVs) collision avoidance problem. Most of these solutions consider that the ground controller system (GCS) determines the path of a UAV before starting a particular mission at hand. Furthermore, these solutions expect the occurrence of collisions based only on the GPS localization of UAVs as well as via object-detecting sensors placed on board UAVs. The sensors' sensitivity to environmental disturbances and the UAVs' influence on their accuracy impact negatively the efficiency of these solutions. In this vein, this paper proposes a new energy and delay-aware physical collision avoidance solution for UAVs. The solution is dubbed EDC-UAV. The primary goal of EDC-UAV is to build inflight safe UAVs trajectories while minimizing the energy consumption and response time. We assume that each UAV is equipped with a global positioning system (GPS) sensor to identify its position. Moreover, we take into account the margin error of the GPS to provide the position of a given UAV. The location of each UAV is gathered by a cluster head, which is the UAV that has either the highest autonomy or the greatest computational capacity. The cluster head runs the EDC-UAV algorithm to control the rest of the UAVs, thus guaranteeing a collision-free mission and minimizing the energy consumption to achieve different purposes. The proper operation of our solution is validated through simulations. The obtained results demonstrate the efficiency of EDC-UAV in achieving its design goals.
Joint Sub-carrier and Power Allocation for Efficient Communication of Cellular UAVs
Jan 03, 2022



Cellular networks are expected to be the main communication infrastructure to support the expanding applications of Unmanned Aerial Vehicles (UAVs). As these networks are deployed to serve ground User Equipment (UES), several issues need to be addressed to enhance cellular UAVs'services.In this paper, we propose a realistic communication model on the downlink,and we show that the Quality of Service (QoS)for the users is affected by the number of interfering BSs and the impact they cause. The joint problem of sub-carrier and power allocation is therefore addressed. Given its complexity, which is known to be NP-hard, we introduce a solution based on game theory. First, we argue that separating between UAVs and UEs in terms of the assigned sub-carriers reduces the interference impact on the users. This is materialized through a matching game. Moreover, in order to boost the partition, we propose a coalitional game that considers the outcome of the first one and enables users to change their coalitions and enhance their QoS. Furthermore, a power optimization solution is introduced, which is considered in the two games. Performance evaluations are conducted, and the obtained results demonstrate the effectiveness of the propositions.