 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Reinforcement Learning-based Quadcopter Controller: A Practical Approach and Experiments
Jun 18, 2024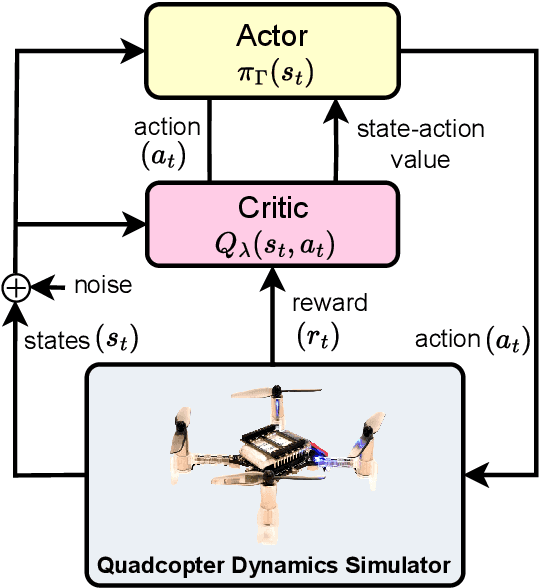
Quadcopters have been studied for decades thanks to their maneuverability and capability of operating in a variety of circumstances. However, quadcopters suffer from dynamical nonlinearity, actuator saturation, as well as sensor noise that make it challenging and time consuming to obtain accurate dynamic models and achieve satisfactory control performance. Fortunately, deep reinforcement learning came and has shown significant potential in system modelling and control of autonomous multirotor aerial vehicles, with recent advancements in deployment, performance enhancement, and generalization. In this paper, an end-to-end deep reinforcement learning-based controller for quadcopters is proposed that is secure for real-world implementation, data-efficient, and free of human gain adjustments. First, a novel actor-critic-based architecture is designed to map the robot states directly to the motor outputs. Then, a quadcopter dynamics-based simulator was devised to facilitate the training of the controller policy. Finally, the trained policy is deployed on a real Crazyflie nano quadrotor platform, without any additional fine-tuning process. Experimental results show that the quadcopter exhibits satisfactory performance as it tracks a given complicated trajectory, which demonstrates the effectiveness and feasibility of the proposed method and signifies its capability in filling the simulation-to-reality gap.
A Vision-based Autonomous Perching Approach for Nano Aerial Vehicles
Jun 16, 2023Over the past decades, quadcopters have been investigated, due to their mobility and flexibility to operate in a wide range of environments. They have been used in various areas, including surveillance and monitoring. During a mission, drones do not have to remain active once they have reached a target location. To conserve energy and maintain a static position, it is possible to perch and stop the motors in such situations. The problem of achieving a reliable and highly accurate perching method remains a challenge and promising. In this paper, a vision-based autonomous perching approach for nano quadcopters onto a predefined perching target on horizontal surfaces is proposed. First, a perching target with a small marker inside a larger one is designed to improve detection capability at a variety of ranges. Second, a monocular camera is used to calculate the relative poses of the flying vehicle from the markers detected. Then, a Kalman filter is applied to determine the pose more reliably, especially when measurement data is missing. Next, we introduce an algorithm for merging the pose data from multiple markers. Finally, the poses are sent to the perching planner to conduct the real flight test to align the drone with the target's center and steer it there. Based on the experimental results, the approach proved to be effective and feasible. The drone can successfully perch on the center of markers within two centimeters of precision.