 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Logic-Aware Manipulation: A Knowledge Primitive for VLM-Based Assistants in Smart Manufacturing
Dec 12, 2025
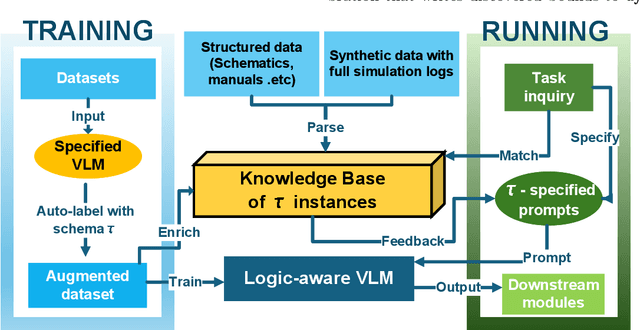


Existing pipelines for vision-language models (VLMs) in robotic manipulation prioritize broad semantic generalization from images and language, but typically omit execution-critical parameters required for contact-rich actions in manufacturing cells. We formalize an object-centric manipulation-logic schema, serialized as an eight-field tuple τ, which exposes object, interface, trajectory, tolerance, and force/impedance information as a first-class knowledge signal between human operators, VLM-based assistants, and robot controllers. We instantiate τ and a small knowledge base (KB) on a 3D-printer spool-removal task in a collaborative cell, and analyze τ-conditioned VLM planning using plan-quality metrics adapted from recent VLM/LLM planning benchmarks, while demonstrating how the same schema supports taxonomy-tagged data augmentation at training time and logic-aware retrieval-augmented prompting at test time as a building block for assistant systems in smart manufacturing enterprises.
Bio-inspired reconfigurable stereo vision for robotics using omnidirectional cameras
Oct 11, 2024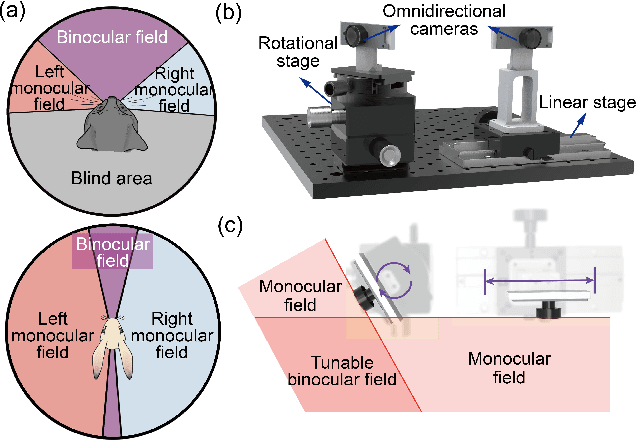
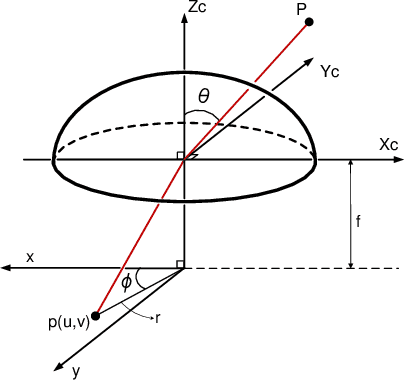
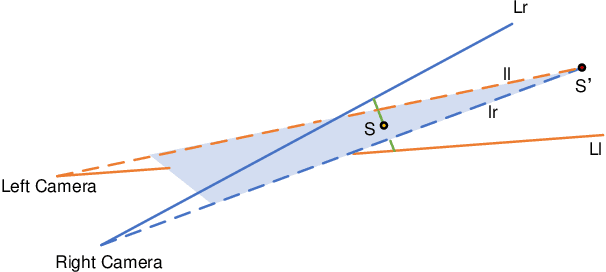
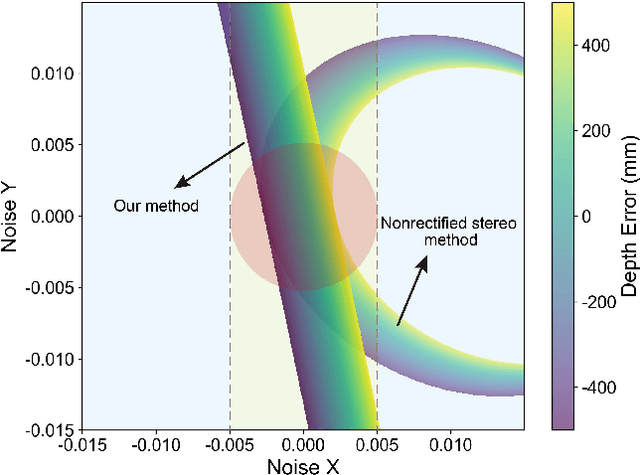
This work introduces a novel bio-inspired reconfigurable stereo vision system for robotics, leveraging omnidirectional cameras and a novel algorithm to achieve flexible visual capabilities. Inspired by the adaptive vision of various species, our visual system addresses traditional stereo vision limitations, i.e., immutable camera alignment with narrow fields of view, by introducing a reconfigurable stereo vision system to robotics. Our key innovations include the reconfigurable stereo vision strategy that allows dynamic camera alignment, a robust depth measurement system utilizing a nonrectified geometrical method combined with a deep neural network for feature matching, and a geometrical compensation technique to enhance visual accuracy. Implemented on a metamorphic robot, this vision system demonstrates its great adaptability to various scenarios by switching its configurations of 316{\deg} monocular with 79{\deg} binocular field for fast target seeking and 242{\deg} monocular with 150{\deg} binocular field for detailed close inspection.