 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeveloping an Explainable Artificial Intelligent (XAI) Model for Predicting Pile Driving Vibrations in Bangkok's Subsoil
Sep 08, 2024
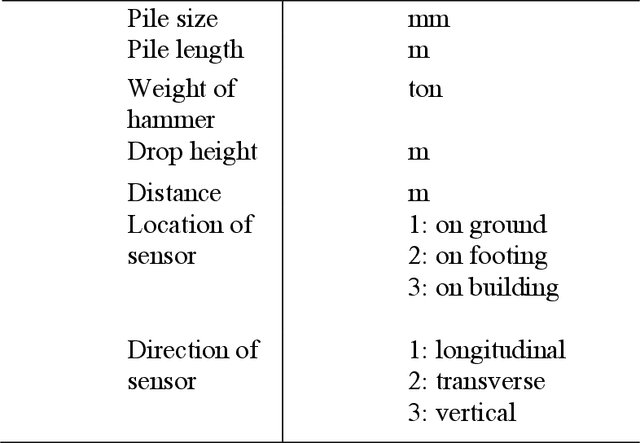

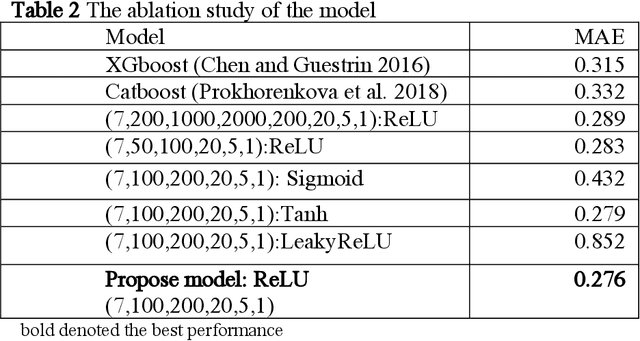
This study presents an explainable artificial intelligent (XAI) model for predicting pile driving vibrations in Bangkok's soft clay subsoil. A deep neural network was developed using a dataset of 1,018 real-world pile driving measurements, encompassing variations in pile dimensions, hammer characteristics, sensor locations, and vibration measurement axes. The model achieved a mean absolute error (MAE) of 0.276, outperforming traditional empirical methods and other machine learning approaches such as XGBoost and CatBoost. SHapley Additive exPlanations (SHAP) analysis was employed to interpret the model's predictions, revealing complex relationships between input features and peak particle velocity (PPV). Distance from the pile driving location emerged as the most influential factor, followed by hammer weight and pile size. Non-linear relationships and threshold effects were observed, providing new insights into vibration propagation in soft clay. A web-based application was developed to facilitate adoption by practicing engineers, bridging the gap between advanced machine learning techniques and practical engineering applications. This research contributes to the field of geotechnical engineering by offering a more accurate and nuanced approach to predicting pile driving vibrations, with implications for optimizing construction practices and mitigating environmental impacts in urban areas. The model and its source code are publicly available, promoting transparency and reproducibility in geotechnical research.
YOLO9tr: A Lightweight Model for Pavement Damage Detection Utilizing a Generalized Efficient Layer Aggregation Network and Attention Mechanism
Jun 18, 2024Maintaining road pavement integrity is crucial for ensuring safe and efficient transportation. Conventional methods for assessing pavement condition are often laborious and susceptible to human error. This paper proposes YOLO9tr, a novel lightweight object detection model for pavement damage detection, leveraging the advancements of deep learning. YOLO9tr is based on the YOLOv9 architecture, incorporating a partial attention block that enhances feature extraction and attention mechanisms, leading to improved detection performance in complex scenarios. The model is trained on a comprehensive dataset comprising road damage images from multiple countries, including an expanded set of damage categories beyond the standard four. This broadened classification range allows for a more accurate and realistic assessment of pavement conditions. Comparative analysis demonstrates YOLO9tr's superior precision and inference speed compared to state-of-the-art models like YOLO8, YOLO9 and YOLO10, achieving a balance between computational efficiency and detection accuracy. The model achieves a high frame rate of up to 136 FPS, making it suitable for real-time applications such as video surveillance and automated inspection systems. The research presents an ablation study to analyze the impact of architectural modifications and hyperparameter variations on model performance, further validating the effectiveness of the partial attention block. The results highlight YOLO9tr's potential for practical deployment in real-time pavement condition monitoring, contributing to the development of robust and efficient solutions for maintaining safe and functional road infrastructure.
Transformer-Based Deep Learning Model for Bored Pile Load-Deformation Prediction in Bangkok Subsoil
Dec 05, 2023This paper presents a novel deep learning model based on the transformer architecture to predict the load-deformation behavior of large bored piles in Bangkok subsoil. The model encodes the soil profile and pile features as tokenization input, and generates the load-deformation curve as output. The model also incorporates the previous sequential data of load-deformation curve into the decoder to improve the prediction accuracy. The model also incorporates the previous sequential data of load-deformation curve into the decoder. The model shows a satisfactory accuracy and generalization ability for the load-deformation curve prediction, with a mean absolute error of 5.72% for the test data. The model could also be used for parametric analysis and design optimization of piles under different soil and pile conditions, pile cross section, pile length and type of pile.
Transformer Based Model for Predicting Rapid Impact Compaction Outcomes: A Case Study of Utapao International Airport
Nov 29, 2023This paper introduces a novel deep learning approach to predict the engineering properties of the ground improved by Rapid Impact Compaction (RIC), which is a ground improvement technique that uses a drop hammer to compact the soil and fill layers. The proposed approach uses transformer-based neural networks to capture the complex nonlinear relationships between the input features, such as the hammer energy, drop height, and number of blows, and the output variables, such as the cone resistance. The approach is applied to a real-world dataset from a trial test section for the new apron construction of the Utapao International Airport in Thailand. The results show that the proposed approach outperforms the existing methods in terms of prediction accuracy and efficiency and provides interpretable attention maps that reveal the importance of different features for RIC prediction. The paper also discusses the limitations and future directions of applying deep learning methods to RIC prediction.
Computer Vision for Particle Size Analysis of Coarse-Grained Soils
Nov 11, 2023
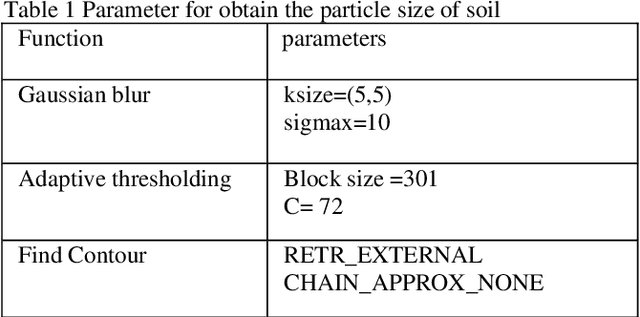

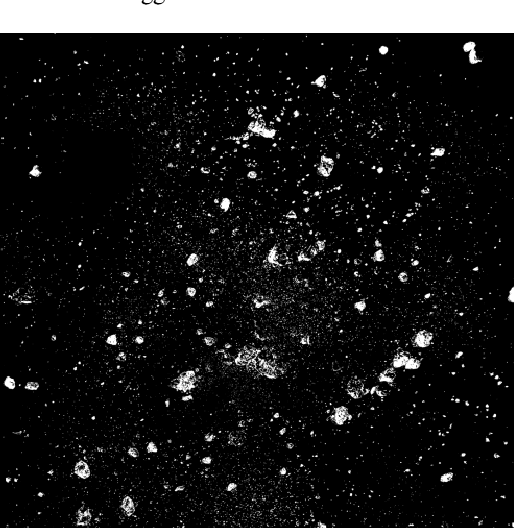
Particle size analysis (PSA) is a fundamental technique for evaluating the physical characteristics of soils. However, traditional methods like sieving can be time-consuming and labor-intensive. In this study, we present a novel approach that utilizes computer vision (CV) and the Python programming language for PSA of coarse-grained soils, employing a standard mobile phone camera. By eliminating the need for a high-performance camera, our method offers convenience and cost savings. Our methodology involves using the OPENCV library to detect and measure soil particles in digital photographs taken under ordinary lighting conditions. For accurate particle size determination, a calibration target with known dimensions is placed on a plain paper alongside 20 different sand samples. The proposed method is compared with traditional sieve analysis and exhibits satisfactory performance for soil particles larger than 2 mm, with a mean absolute percent error (MAPE) of approximately 6%. However, particles smaller than 2 mm result in higher MAPE, reaching up to 60%. To address this limitation, we recommend using a higher-resolution camera to capture images of the smaller soil particles. Furthermore, we discuss the advantages, limitations, and potential future improvements of our method. Remarkably, the program can be executed on a mobile phone, providing immediate results without the need to send soil samples to a laboratory. This field-friendly feature makes our approach highly convenient for on-site usage, outside of a traditional laboratory setting. Ultimately, this novel method represents an initial disruption to the industry, enabling efficient particle size analysis of soil without the reliance on laboratory-based sieve analysis. KEYWORDS: Computer vision, Grain size, ARUCO