 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards socially-competent and culturally-adaptive artificial agents Expressive order, interactional disruptions and recovery strategies
Aug 06, 2023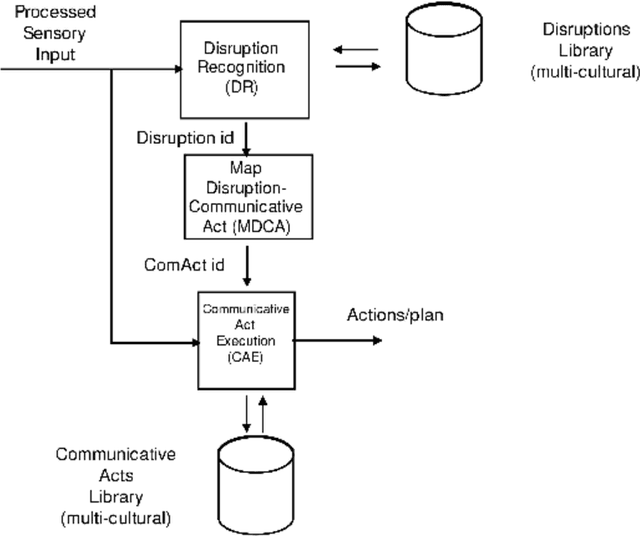
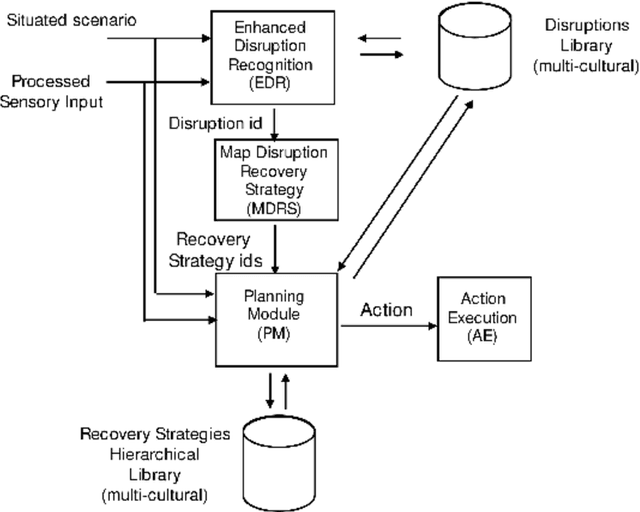
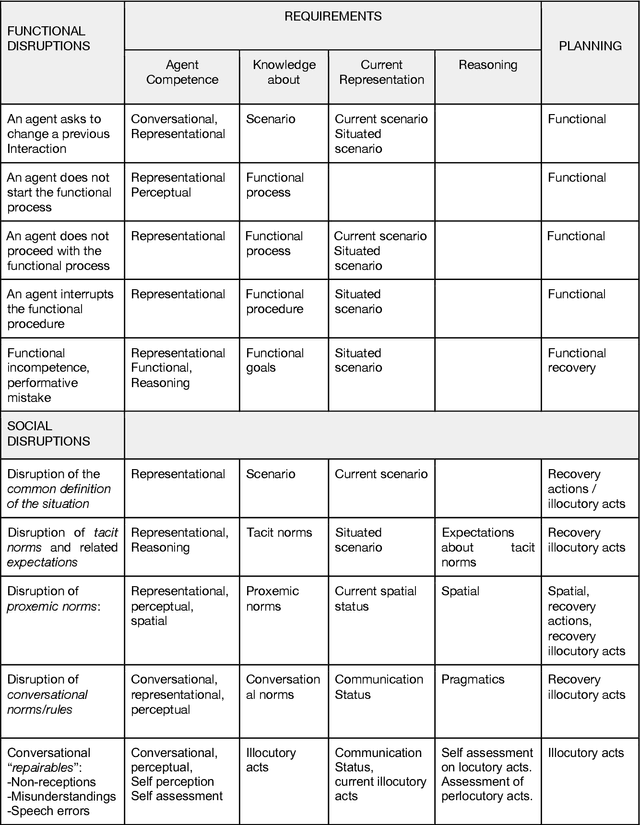
The development of artificial agents for social interaction pushes to enrich robots with social skills and knowledge about (local) social norms. One possibility is to distinguish the expressive and the functional orders during a human-robot interaction. The overarching aim of this work is to set a framework to make the artificial agent socially-competent beyond dyadic interaction-interaction in varying multi-party social situations-and beyond individual-based user personalization, thereby enlarging the current conception of "culturally-adaptive". The core idea is to provide the artificial agent with the capability to handle different kinds of interactional disruptions, and associated recovery strategies, in microsociology. The result is obtained by classifying functional and social disruptions, and by investigating the requirements a robot's architecture should satisfy to exploit such knowledge. The paper also highlights how this level of competence is achieved by focusing on just three dimensions: (i) social capability, (ii) relational role, and (iii) proximity, leaving aside the further complexity of full-fledged human-human interactions. Without going into technical aspects, End-to-end Data-driven Architectures and Modular Architectures are discussed to evaluate the degree to which they can exploit this new set of social and cultural knowledge. Finally, a list of general requirements for such agents is proposed.