 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoverage Hole Elimination System in Industrial Environment
Nov 07, 2023

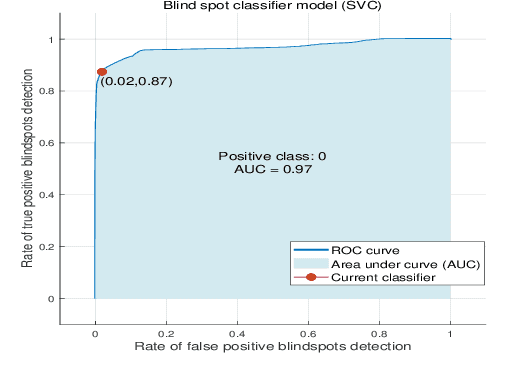

The paper proposes a framework to identify and avoid the coverage hole in an indoor industry environment. We assume an edge cloud co-located controller that followers the Automated Guided Vehicle (AGV) movement on a factory floor over a wireless channel. The coverage holes are caused due to blockage, path-loss, and fading effects. An AGV in the coverage hole may lose connectivity to the edge-cloud and become unstable. To avoid connectivity loss, we proposed a framework that identifies the position of coverage hole using a Support- Vector Machine (SVM) classifier model and constructs a binary coverage hole map incorporating the AGV trajectory re-planning to avoid the identified coverage hole. The AGV's re-planned trajectory is optimized and selected to avoid coverage hole the shortest coverage-hole-free trajectory. We further investigated the look-ahead time's impact on the AGV's re-planned trajectory performance. The results reveal that an AGV's re-planned trajectory can be shorter and further optimized if the coverage hole position is known ahead of time
* IEEE copyright
Resource Allocation with Stability Constraints of an Edge-cloud controlled AGV
Jan 23, 2023The paper proposes Resource Allocation (RA) schemes for a closed loop feedback control system by analysing the control-communication dependencies. We consider an Automated Guided Vehicle (AGV) that communicates with a controller located in an edge-cloud over a wireless fading channel. The control commands are transmitted to an AGV and the position state is feedback to the controller at every time-instant. A control stability based scheduling metric 'Probability of Instability' is evaluated for the resource allocation. The performance of stability based RA scheme is compared with the maximum SNR based RA scheme and control error first approach in an overloaded and non-overloaded scenario. The RA scheme with the stability constraints significantly reduces the resource utilization and is able to schedule more number of AGVs while maintaining its stability. Moreover, the proposed RA scheme is independent of control state and depends upon consecutive packet errors, the control parameters like sampling time and AGV velocity. Furthermore, we also analyse the impact of RA schemes on the AGV's stability and error performance, and evaluated the number of unstable AGVs.