 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFINN-GL: Generalized Mixed-Precision Extensions for FPGA-Accelerated LSTMs
Jun 25, 2025Recurrent neural networks (RNNs), particularly LSTMs, are effective for time-series tasks like sentiment analysis and short-term stock prediction. However, their computational complexity poses challenges for real-time deployment in resource constrained environments. While FPGAs offer a promising platform for energy-efficient AI acceleration, existing tools mainly target feed-forward networks, and LSTM acceleration typically requires full custom implementation. In this paper, we address this gap by leveraging the open-source and extensible FINN framework to enable the generalized deployment of LSTMs on FPGAs. Specifically, we leverage the Scan operator from the Open Neural Network Exchange (ONNX) specification to model the recurrent nature of LSTM computations, enabling support for mixed quantisation within them and functional verification of LSTM-based models. Furthermore, we introduce custom transformations within the FINN compiler to map the quantised ONNX computation graph to hardware blocks from the HLS kernel library of the FINN compiler and Vitis HLS. We validate the proposed tool-flow by training a quantised ConvLSTM model for a mid-price stock prediction task using the widely used dataset and generating a corresponding hardware IP of the model using our flow, targeting the XCZU7EV device. We show that the generated quantised ConvLSTM accelerator through our flow achieves a balance between performance (latency) and resource consumption, while matching (or bettering) inference accuracy of state-of-the-art models with reduced precision. We believe that the generalisable nature of the proposed flow will pave the way for resource-efficient RNN accelerator designs on FPGAs.
SecCAN: An Extended CAN Controller with Embedded Intrusion Detection
May 20, 2025Recent research has highlighted the vulnerability of in-vehicle network protocols such as controller area networks (CAN) and proposed machine learning-based intrusion detection systems (IDSs) as an effective mitigation technique. However, their efficient integration into vehicular architecture is non-trivial, with existing methods relying on electronic control units (ECUs)-coupled IDS accelerators or dedicated ECUs as IDS accelerators. Here, initiating IDS requires complete reception of a CAN message from the controller, incurring data movement and software overheads. In this paper, we present SecCAN, a novel CAN controller architecture that embeds IDS capability within the datapath of the controller. This integration allows IDS to tap messages directly from within the CAN controller as they are received from the bus, removing overheads incurred by existing ML-based IDSs. A custom-quantised machine-learning accelerator is developed as the IDS engine and embedded into SecCAN's receive data path, with optimisations to overlap the IDS inference with the protocol's reception window. We implement SecCAN on AMD XCZU7EV FPGA to quantify its performance and benefits in hardware, using multiple attack datasets. We show that SecCAN can completely hide the IDS latency within the CAN reception window for all CAN packet sizes and detect multiple attacks with state-of-the-art accuracy with zero software overheads on the ECU and low energy overhead (73.7 uJ per message) for IDS inference. Also, SecCAN incurs limited resource overhead compared to a standard CAN controller (< 30% LUT, < 1% FF), making it ideally suited for automotive deployment.
Accelerating local laplacian filters on FPGAs
Feb 18, 2024


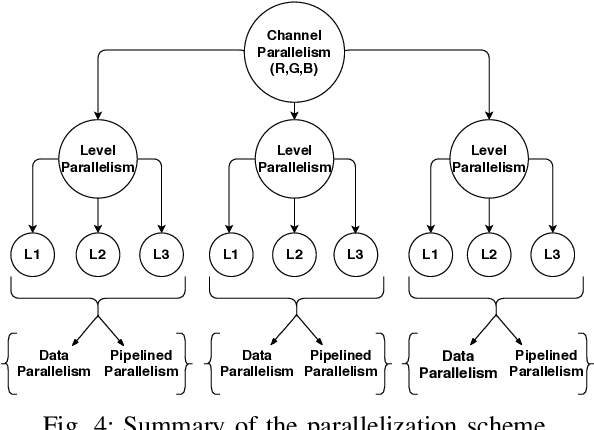
Images when processed using various enhancement techniques often lead to edge degradation and other unwanted artifacts such as halos. These artifacts pose a major problem for photographic applications where they can denude the quality of an image. There is a plethora of edge-aware techniques proposed in the field of image processing. However, these require the application of complex optimization or post-processing methods. Local Laplacian Filtering is an edge-aware image processing technique that involves the construction of simple Gaussian and Laplacian pyramids. This technique can be successfully applied for detail smoothing, detail enhancement, tone mapping and inverse tone mapping of an image while keeping it artifact-free. The problem though with this approach is that it is computationally expensive. Hence, parallelization schemes using multi-core CPUs and GPUs have been proposed. As is well known, they are not power-efficient, and a well-designed hardware architecture on an FPGA can do better on the performance per watt metric. In this paper, we propose a hardware accelerator, which exploits fully the available parallelism in the Local Laplacian Filtering algorithm, while minimizing the utilization of on-chip FPGA resources. On Virtex-7 FPGA, we obtain a 7.5x speed-up to process a 1 MB image when compared to an optimized baseline CPU implementation. To the best of our knowledge, we are not aware of any other hardware accelerators proposed in the research literature for the Local Laplacian Filtering problem.
* 6 pages, 5 figures, 2 tables
Deep Learning-based Embedded Intrusion Detection System for Automotive CAN
Jan 19, 2024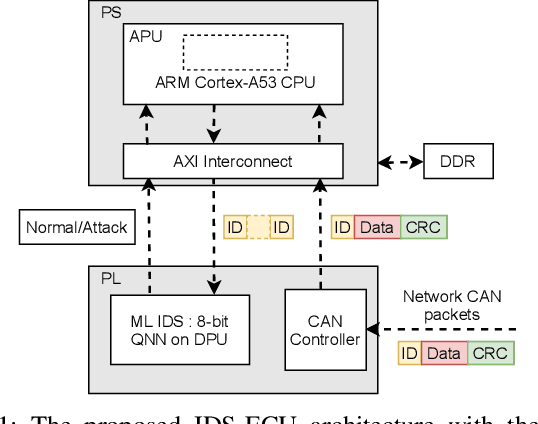
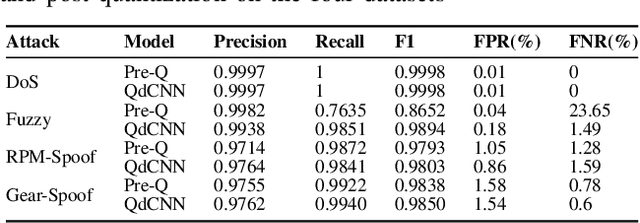
Rising complexity of in-vehicle electronics is enabling new capabilities like autonomous driving and active safety. However, rising automation also increases risk of security threats which is compounded by lack of in-built security measures in legacy networks like CAN, allowing attackers to observe, tamper and modify information shared over such broadcast networks. Various intrusion detection approaches have been proposed to detect and tackle such threats, with machine learning models proving highly effective. However, deploying machine learning models will require high processing power through high-end processors or GPUs to perform them close to line rate. In this paper, we propose a hybrid FPGA-based ECU approach that can transparently integrate IDS functionality through a dedicated off-the-shelf hardware accelerator that implements a deep-CNN intrusion detection model. Our results show that the proposed approach provides an average accuracy of over 99% across multiple attack datasets with 0.64% false detection rates while consuming 94% less energy and achieving 51.8% reduction in per-message processing latency when compared to IDS implementations on GPUs.
* 5 pages, 1 figure, 8 tables
A Lightweight Multi-Attack CAN Intrusion Detection System on Hybrid FPGAs
Jan 19, 2024Rising connectivity in vehicles is enabling new capabilities like connected autonomous driving and advanced driver assistance systems (ADAS) for improving the safety and reliability of next-generation vehicles. This increased access to in-vehicle functions compromises critical capabilities that use legacy invehicle networks like Controller Area Network (CAN), which has no inherent security or authentication mechanism. Intrusion detection and mitigation approaches, particularly using machine learning models, have shown promising results in detecting multiple attack vectors in CAN through their ability to generalise to new vectors. However, most deployments require dedicated computing units like GPUs to perform line-rate detection, consuming much higher power. In this paper, we present a lightweight multi-attack quantised machine learning model that is deployed using Xilinx's Deep Learning Processing Unit IP on a Zynq Ultrascale+ (XCZU3EG) FPGA, which is trained and validated using the public CAN Intrusion Detection dataset. The quantised model detects denial of service and fuzzing attacks with an accuracy of above 99 % and a false positive rate of 0.07%, which are comparable to the state-of-the-art techniques in the literature. The Intrusion Detection System (IDS) execution consumes just 2.0 W with software tasks running on the ECU and achieves a 25 % reduction in per-message processing latency over the state-of-the-art implementations. This deployment allows the ECU function to coexist with the IDS with minimal changes to the tasks, making it ideal for real-time IDS in in-vehicle systems.
* 5 pages, 2 figures, 6 tables
A Lightweight FPGA-based IDS-ECU Architecture for Automotive CAN
Jan 19, 2024Recent years have seen an exponential rise in complex software-driven functionality in vehicles, leading to a rising number of electronic control units (ECUs), network capabilities, and interfaces. These expanded capabilities also bring-in new planes of vulnerabilities making intrusion detection and management a critical capability; however, this can often result in more ECUs and network elements due to the high computational overheads. In this paper, we present a consolidated ECU architecture incorporating an Intrusion Detection System (IDS) for Automotive Controller Area Network (CAN) along with traditional ECU functionality on an off-the-shelf hybrid FPGA device, with near-zero overhead for the ECU functionality. We propose two quantised multi-layer perceptrons (QMLP's) as isolated IDSs for detecting a range of attack vectors including Denial-of-Service, Fuzzing and Spoofing, which are accelerated using off-the-shelf deep-learning processing unit (DPU) IP block from Xilinx, operating fully transparently to the software on the ECU. The proposed models achieve the state-of-the-art classification accuracy for all the attacks, while we observed a 15x reduction in power consumption when compared against the GPU-based implementation of the same models quantised using Nvidia libraries. We also achieved a 2.3x speed up in per-message processing latency (at 0.24 ms from the arrival of a CAN message) to meet the strict end-to-end latency on critical CAN nodes and a 2.6x reduction in power consumption for inference when compared to the state-of-the-art IDS models on embedded IDS and loosely coupled IDS accelerators (GPUs) discussed in the literature.
* 9 pages, 3 figures, 11 tables
Exploring Highly Quantised Neural Networks for Intrusion Detection in Automotive CAN
Jan 19, 2024



Vehicles today comprise intelligent systems like connected autonomous driving and advanced driving assistance systems (ADAS) to enhance the driving experience, which is enabled through increased connectivity to infrastructure and fusion of information from different sensing modes. However, the rising connectivity coupled with the legacy network architecture within vehicles can be exploited for launching active and passive attacks on critical vehicle systems and directly affecting the safety of passengers. Machine learning-based intrusion detection models have been shown to successfully detect multiple targeted attack vectors in recent literature, whose deployments are enabled through quantised neural networks targeting low-power platforms. Multiple models are often required to simultaneously detect multiple attack vectors, increasing the area, (resource) cost, and energy consumption. In this paper, we present a case for utilising custom-quantised MLP's (CQMLP) as a multi-class classification model, capable of detecting multiple attacks from the benign flow of controller area network (CAN) messages. The specific quantisation and neural architecture are determined through a joint design space exploration, resulting in our choice of the 2-bit precision and the n-layer MLP. Our 2-bit version is trained using Brevitas and optimised as a dataflow hardware model through the FINN toolflow from AMD/Xilinx, targeting an XCZU7EV device. We show that the 2-bit CQMLP model, when integrated as the IDS, can detect malicious attack messages (DoS, fuzzing, and spoofing attack) with a very high accuracy of 99.9%, on par with the state-of-the-art methods in the literature. Furthermore, the dataflow model can perform line rate detection at a latency of 0.11 ms from message reception while consuming 0.23 mJ/inference, making it ideally suited for integration with an ECU in critical CAN networks.
* 7 pages, 5 figures, 6 tables. arXiv admin note: substantial text overlap with arXiv:2401.10724
Quantised Neural Network Accelerators for Low-Power IDS in Automotive Networks
Jan 19, 2024In this paper, we explore low-power custom quantised Multi-Layer Perceptrons (MLPs) as an Intrusion Detection System (IDS) for automotive controller area network (CAN). We utilise the FINN framework from AMD/Xilinx to quantise, train and generate hardware IP of our MLP to detect denial of service (DoS) and fuzzying attacks on CAN network, using ZCU104 (XCZU7EV) FPGA as our target ECU architecture with integrated IDS capabilities. Our approach achieves significant improvements in latency (0.12 ms per-message processing latency) and inference energy consumption (0.25 mJ per inference) while achieving similar classification performance as state-of-the-art approaches in the literature.
* 2 pages, 1 figure, 2 tables. arXiv admin note: text overlap with arXiv:2401.11030
Real-Time Zero-Day Intrusion Detection System for Automotive Controller Area Network on FPGAs
Jan 19, 2024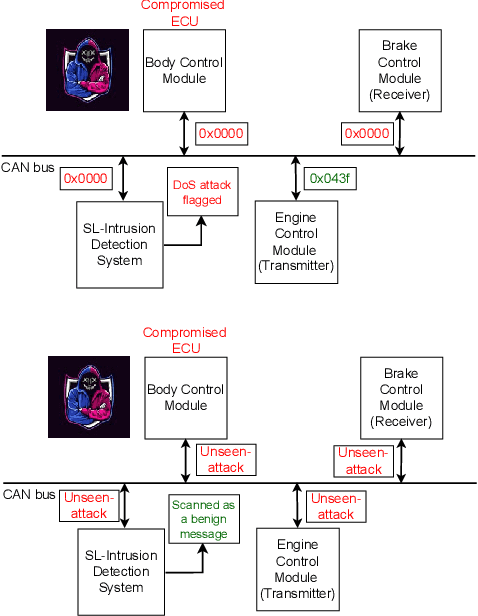

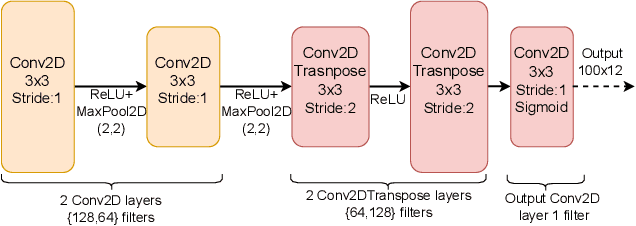
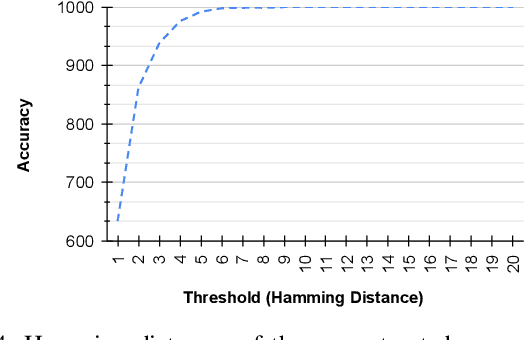
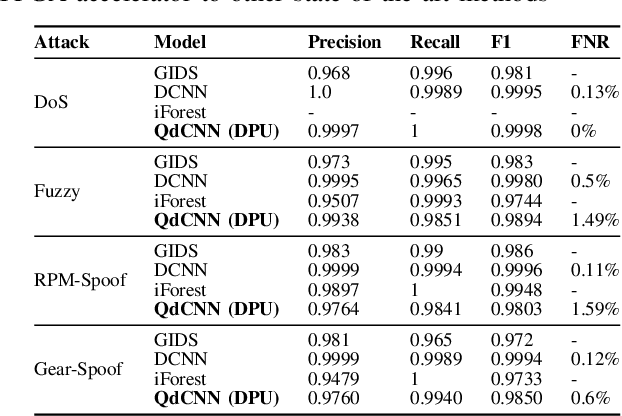
Increasing automation in vehicles enabled by increased connectivity to the outside world has exposed vulnerabilities in previously siloed automotive networks like controller area networks (CAN). Attributes of CAN such as broadcast-based communication among electronic control units (ECUs) that lowered deployment costs are now being exploited to carry out active injection attacks like denial of service (DoS), fuzzing, and spoofing attacks. Research literature has proposed multiple supervised machine learning models deployed as Intrusion detection systems (IDSs) to detect such malicious activity; however, these are largely limited to identifying previously known attack vectors. With the ever-increasing complexity of active injection attacks, detecting zero-day (novel) attacks in these networks in real-time (to prevent propagation) becomes a problem of particular interest. This paper presents an unsupervised-learning-based convolutional autoencoder architecture for detecting zero-day attacks, which is trained only on benign (attack-free) CAN messages. We quantise the model using Vitis-AI tools from AMD/Xilinx targeting a resource-constrained Zynq Ultrascale platform as our IDS-ECU system for integration. The proposed model successfully achieves equal or higher classification accuracy (> 99.5%) on unseen DoS, fuzzing, and spoofing attacks from a publicly available attack dataset when compared to the state-of-the-art unsupervised learning-based IDSs. Additionally, by cleverly overlapping IDS operation on a window of CAN messages with the reception, the model is able to meet line-rate detection (0.43 ms per window) of high-speed CAN, which when coupled with the low energy consumption per inference, makes this architecture ideally suited for detecting zero-day attacks on critical CAN networks.
* 8 pages, 6 figures, 7 tables