 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForaNav: Insect-inspired Online Target-oriented Navigation for MAVs in Tree Plantations
Mar 04, 2025Autonomous Micro Air Vehicles (MAVs) are becoming essential in precision agriculture to enhance efficiency and reduce labor costs through targeted, real-time operations. However, existing unmanned systems often rely on GPS-based navigation, which is prone to inaccuracies in rural areas and limits flight paths to predefined routes, resulting in operational inefficiencies. To address these challenges, this paper presents ForaNav, an insect-inspired navigation strategy for autonomous navigation in plantations. The proposed method employs an enhanced Histogram of Oriented Gradient (HOG)-based tree detection approach, integrating hue-saturation histograms and global HOG feature variance with hierarchical HOG extraction to distinguish oil palm trees from visually similar objects. Inspired by insect foraging behavior, the MAV dynamically adjusts its path based on detected trees and employs a recovery mechanism to stay on course if a target is temporarily lost. We demonstrate that our detection method generalizes well to different tree types while maintaining lower CPU usage, lower temperature, and higher FPS than lightweight deep learning models, making it well-suited for real-time applications. Flight test results across diverse real-world scenarios show that the MAV successfully detects and approaches all trees without prior tree location, validating its effectiveness for agricultural automation.
Analysis of Transferred Pre-Trained Deep Convolution Neural Networks in Breast Masses Recognition
Dec 23, 2024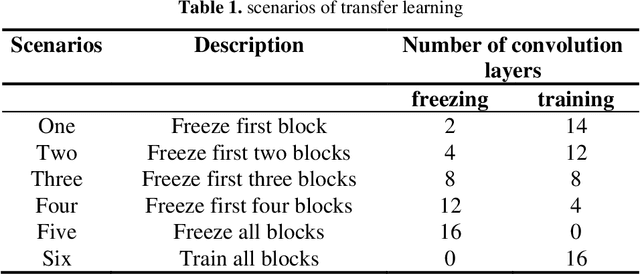
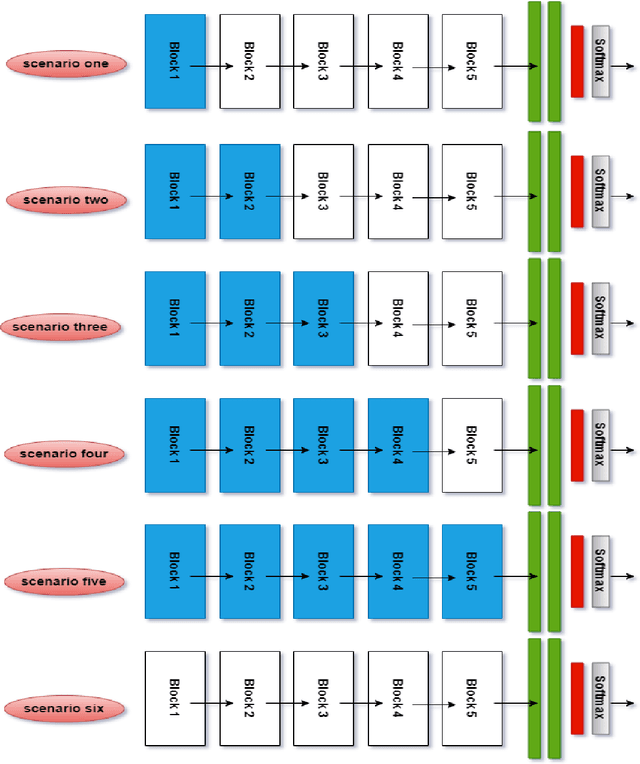
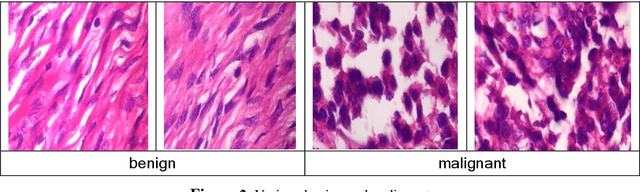
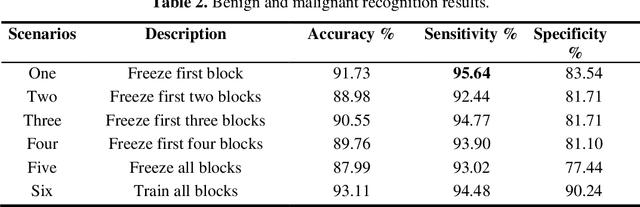
Breast cancer detection based on pre-trained convolution neural network (CNN) has gained much interest among other conventional computer-based systems. In the past few years, CNN technology has been the most promising way to find cancer in mammogram scans. In this paper, the effect of layer freezing in a pre-trained CNN is investigated for breast cancer detection by classifying mammogram images as benign or malignant. Different VGG19 scenarios have been examined based on the number of convolution layer blocks that have been frozen. There are a total of six scenarios in this study. The primary benefits of this research are twofold: it improves the model's ability to detect breast cancer cases and it reduces the training time of VGG19 by freezing certain layers.To evaluate the performance of these scenarios, 1693 microbiological images of benign and malignant breast cancers were utilized. According to the reported results, the best recognition rate was obtained from a frozen first block of VGG19 with a sensitivity of 95.64 %, while the training of the entire VGG19 yielded 94.48%.
A Comprehensive Review on Tree Detection Methods Using Point Cloud and Aerial Imagery from Unmanned Aerial Vehicles
Oct 07, 2023Unmanned Aerial Vehicles (UAVs) are considered cutting-edge technology with highly cost-effective and flexible usage scenarios. Although many papers have reviewed the application of UAVs in agriculture, the review of the application for tree detection is still insufficient. This paper focuses on tree detection methods applied to UAV data collected by UAVs. There are two kinds of data, the point cloud and the images, which are acquired by the Light Detection and Ranging (LiDAR) sensor and camera, respectively. Among the detection methods using point-cloud data, this paper mainly classifies these methods according to LiDAR and Digital Aerial Photography (DAP). For the detection methods using images directly, this paper reviews these methods by whether or not to use the Deep Learning (DL) method. Our review concludes and analyses the comparison and combination between the application of LiDAR-based and DAP-based point cloud data. The performance, relative merits, and application fields of the methods are also introduced. Meanwhile, this review counts the number of tree detection studies using different methods in recent years. From our statics, the detection task using DL methods on the image has become a mainstream trend as the number of DL-based detection researches increases to 45% of the total number of tree detection studies up to 2022. As a result, this review could help and guide researchers who want to carry out tree detection on specific forests and for farmers to use UAVs in managing agriculture production.