 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Teaching in Sequential Decision Making Environments
Oct 16, 2012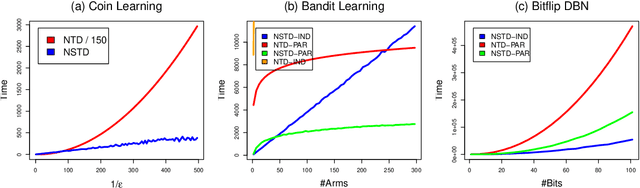
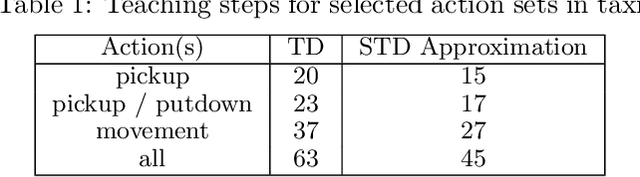
We describe theoretical bounds and a practical algorithm for teaching a model by demonstration in a sequential decision making environment. Unlike previous efforts that have optimized learners that watch a teacher demonstrate a static policy, we focus on the teacher as a decision maker who can dynamically choose different policies to teach different parts of the environment. We develop several teaching frameworks based on previously defined supervised protocols, such as Teaching Dimension, extending them to handle noise and sequences of inputs encountered in an MDP.We provide theoretical bounds on the learnability of several important model classes in this setting and suggest a practical algorithm for dynamic teaching.
From Exact Learning to Computing Boolean Functions and Back Again
May 19, 2012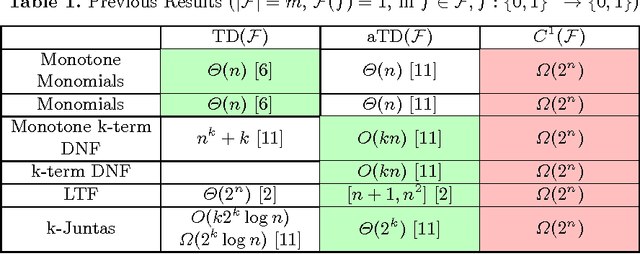
The goal of the paper is to relate complexity measures associated with the evaluation of Boolean functions (certificate complexity, decision tree complexity) and learning dimensions used to characterize exact learning (teaching dimension, extended teaching dimension). The high level motivation is to discover non-trivial relations between exact learning of an unknown concept and testing whether an unknown concept is part of a concept class or not. Concretely, the goal is to provide lower and upper bounds of complexity measures for one problem type in terms of the other.