 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDRIFT: Drift-Resilient Invariant-Feature Transformer for DGA Detection
May 11, 2026Domain Generation Algorithms (DGAs) evolve continuously to evade botnet detection, posing a persistent challenge for dependable network defense. While deep learning-based detectors achieve strong performance under static conditions, they suffer severe degradation when facing temporal drift. Through a 9-year longitudinal study (2017-2025), we empirically show that state-of-the-art character- and word-based DGA classifiers rapidly lose effectiveness as new DGA variants emerge. To address this problem, we propose a drift-resilient Transformer-based framework that learns invariant representations through a hybrid tokenization strategy and multi-task self-supervised pre-training. The model integrates (i) character-level encoding to capture stochastic morphological patterns and (ii) subword-level encoding for word-based DGAs. Three pre-training tasks enable the model to learn robust structural and contextual features prior to supervised fine-tuning. Comprehensive evaluations demonstrate that our method significantly mitigates temporal degradation and consistently outperforms state-of-the-art baselines in forward-chaining experiments. The proposed approach offers a dependable foundation for long-term DGA defense in evolving threat landscapes. Our code is available at: https://github.com/snsec-net/2026-DSN-DRIFT.
X-CANIDS: Signal-Aware Explainable Intrusion Detection System for Controller Area Network-Based In-Vehicle Network
Mar 22, 2023



Controller Area Network (CAN) is an essential networking protocol that connects multiple electronic control units (ECUs) in a vehicle. However, CAN-based in-vehicle networks (IVNs) face security risks owing to the CAN mechanisms. An adversary can sabotage a vehicle by leveraging the security risks if they can access the CAN bus. Thus, recent actions and cybersecurity regulations (e.g., UNR 155) require carmakers to implement intrusion detection systems (IDSs) in their vehicles. An IDS should detect cyberattacks and provide a forensic capability to analyze attacks. Although many IDSs have been proposed, considerations regarding their feasibility and explainability remain lacking. This study proposes X-CANIDS, which is a novel IDS for CAN-based IVNs. X-CANIDS dissects the payloads in CAN messages into human-understandable signals using a CAN database. The signals improve the intrusion detection performance compared with the use of bit representations of raw payloads. These signals also enable an understanding of which signal or ECU is under attack. X-CANIDS can detect zero-day attacks because it does not require any labeled dataset in the training phase. We confirmed the feasibility of the proposed method through a benchmark test on an automotive-grade embedded device with a GPU. The results of this work will be valuable to carmakers and researchers considering the installation of in-vehicle IDSs for their vehicles.
Convolutional Neural Network-based Intrusion Detection System for AVTP Streams in Automotive Ethernet-based Networks
Feb 06, 2021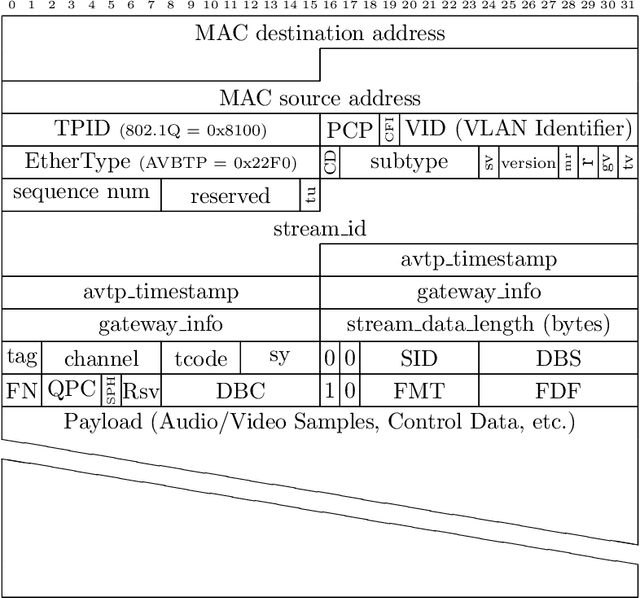
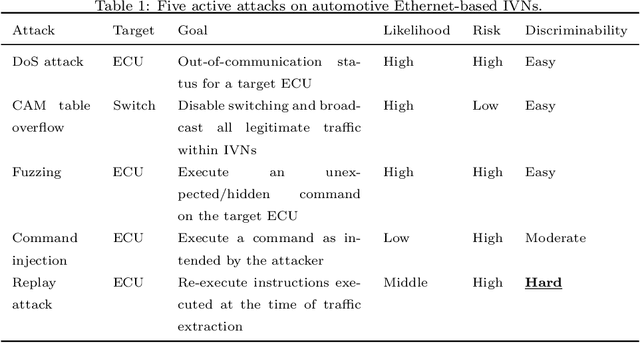
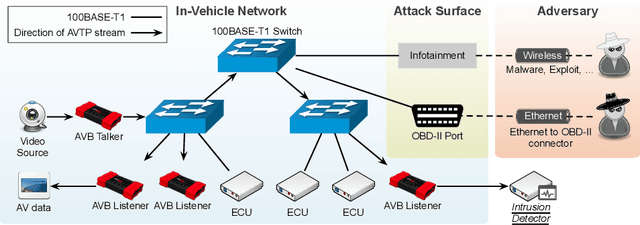
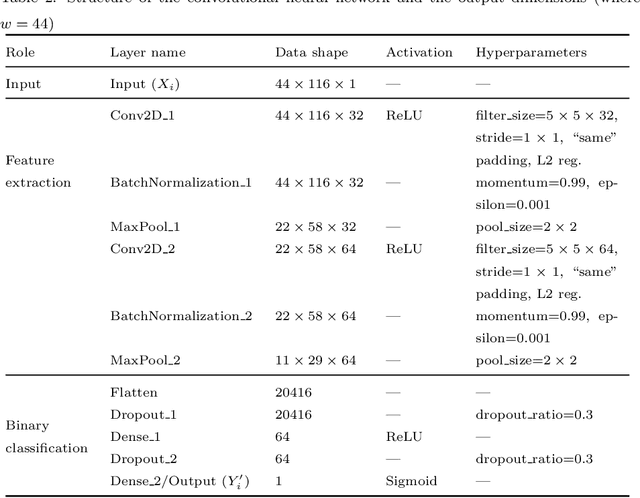
Connected and autonomous vehicles (CAVs) are an innovative form of traditional vehicles. Automotive Ethernet replaces the controller area network and FlexRay to support the large throughput required by high-definition applications. As CAVs have numerous functions, they exhibit a large attack surface and an increased vulnerability to attacks. However, no previous studies have focused on intrusion detection in automotive Ethernet-based networks. In this paper, we present an intrusion detection method for detecting audio-video transport protocol (AVTP) stream injection attacks in automotive Ethernet-based networks. To the best of our knowledge, this is the first such method developed for automotive Ethernet. The proposed intrusion detection model is based on feature generation and a convolutional neural network (CNN). To evaluate our intrusion detection system, we built a physical BroadR-Reach-based testbed and captured real AVTP packets. The experimental results show that the model exhibits outstanding performance: the F1-score and recall are greater than 0.9704 and 0.9949, respectively. In terms of the inference time per input and the generation intervals of AVTP traffic, our CNN model can readily be employed for real-time detection.