 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWeirNet: A Large-Scale 3D CFD Benchmark for Geometric Surrogate Modeling of Piano Key Weirs
Feb 25, 2026Reliable prediction of hydraulic performance is challenging for Piano Key Weir (PKW) design because discharge capacity depends on three-dimensional geometry and operating conditions. Surrogate models can accelerate hydraulic-structure design, but progress is limited by scarce large, well-documented datasets that jointly capture geometric variation, operating conditions, and functional performance. This study presents WeirNet, a large 3D CFD benchmark dataset for geometric surrogate modeling of PKWs. WeirNet contains 3,794 parametric, feasibility-constrained rectangular and trapezoidal PKW geometries, each scheduled at 19 discharge conditions using a consistent free-surface OpenFOAM workflow, resulting in 71,387 completed simulations that form the benchmark and with complete discharge coefficient labels. The dataset is released as multiple modalities compact parametric descriptors, watertight surface meshes and high-resolution point clouds together with standardized tasks and in-distribution and out-of-distribution splits. Representative surrogate families are benchmarked for discharge coefficient prediction. Tree-based regressors on parametric descriptors achieve the best overall accuracy, while point- and mesh-based models remain competitive and offer parameterization-agnostic inference. All surrogates evaluate in milliseconds per sample, providing orders-of-magnitude speedups over CFD runtimes. Out-of-distribution results identify geometry shift as the dominant failure mode compared to unseen discharge values, and data-efficiency experiments show diminishing returns beyond roughly 60% of the training data. By publicly releasing the dataset together with simulation setups and evaluation pipelines, WeirNet establishes a reproducible framework for data-driven hydraulic modeling and enables faster exploration of PKW designs during the early stages of hydraulic planning.
Position Paper on Materials Design -- A Modern Approach
Dec 18, 2023Traditional design cycles for new materials and assemblies have two fundamental drawbacks. The underlying physical relationships are often too complex to be precisely calculated and described. Aside from that, many unknown uncertainties, such as exact manufacturing parameters or materials composition, dominate the real assembly behavior. Machine learning (ML) methods overcome these fundamental limitations through data-driven learning. In addition, modern approaches can specifically increase system knowledge. Representation Learning allows the physical, and if necessary, even symbolic interpretation of the learned solution. In this way, the most complex physical relationships can be considered and quickly described. Furthermore, generative ML approaches can synthesize possible morphologies of the materials based on defined conditions to visualize the effects of uncertainties. This modern approach accelerates the design process for new materials and enables the prediction and interpretation of realistic materials behavior.
A Generative Neural Network Approach for 3D Multi-Criteria Design Generation and Optimization of an Engine Mount for an Unmanned Air Vehicle
Nov 06, 2023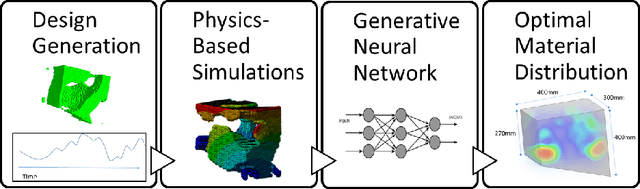
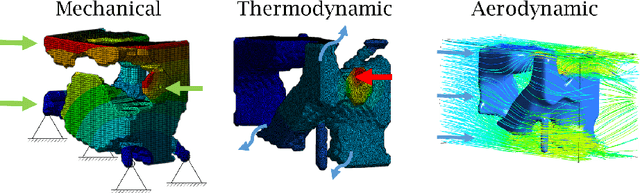
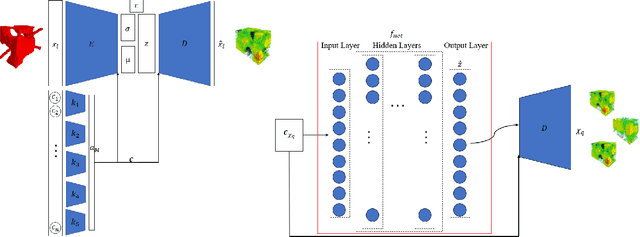
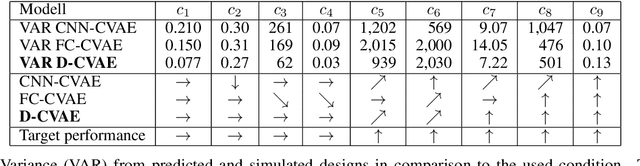
One of the most promising developments in computer vision in recent years is the use of generative neural networks for functionality condition-based 3D design reconstruction and generation. Here, neural networks learn dependencies between functionalities and a geometry in a very effective way. For a neural network the functionalities are translated in conditions to a certain geometry. But the more conditions the design generation needs to reflect, the more difficult it is to learn clear dependencies. This leads to a multi criteria design problem due various conditions, which are not considered in the neural network structure so far. In this paper, we address this multi-criteria challenge for a 3D design use case related to an unmanned aerial vehicle (UAV) motor mount. We generate 10,000 abstract 3D designs and subject them all to simulations for three physical disciplines: mechanics, thermodynamics, and aerodynamics. Then, we train a Conditional Variational Autoencoder (CVAE) using the geometry and corresponding multicriteria functional constraints as input. We use our trained CVAE as well as the Marching cubes algorithm to generate meshes for simulation based evaluation. The results are then evaluated with the generated UAV designs. Subsequently, we demonstrate the ability to generate optimized designs under self-defined functionality conditions using the trained neural network.