 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFedRobo: Federated Learning Driven Autonomous Inter Robots Communication For Optimal Chemical Sprays
Aug 10, 2024


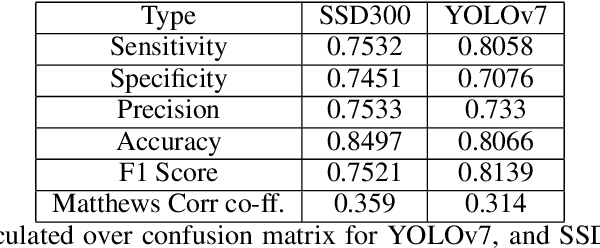
Federated Learning enables robots to learn from each other's experiences without relying on centralized data collection. Each robot independently maintains a model of crop conditions and chemical spray effectiveness, which is periodically shared with other robots in the fleet. A communication protocol is designed to optimize chemical spray applications by facilitating the exchange of information about crop conditions, weather, and other critical factors. The federated learning algorithm leverages this shared data to continuously refine the chemical spray strategy, reducing waste and improving crop yields. This approach has the potential to revolutionize the agriculture industry by offering a scalable and efficient solution for crop protection. However, significant challenges remain, including the development of a secure and robust communication protocol, the design of a federated learning algorithm that effectively integrates data from multiple sources, and ensuring the safety and reliability of autonomous robots. The proposed cluster-based federated learning approach also effectively reduces the computational load on the global server and minimizes communication overhead among clients.