 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDo Mistakes Matter? Comparing Trust Responses of Different Age Groups to Errors Made by Physically Assistive Robots
Aug 23, 2024



Trust is a key factor in ensuring acceptable human-robot interaction, especially in settings where robots may be assisting with critical activities of daily living. When practically deployed, robots are bound to make occasional mistakes, yet the degree to which these errors will impact a care recipient's trust in the robot, especially in performing physically assistive tasks, remains an open question. To investigate this, we conducted experiments where participants interacted with physically assistive robots which would occasionally make intentional mistakes while performing two different tasks: bathing and feeding. Our study considered the error response of two populations: younger adults at a university (median age 26) and older adults at an independent living facility (median age 83). We observed that the impact of errors on a users' trust in the robot depends on both their age and the task that the robot is performing. We also found that older adults tend to evaluate the robot on factors unrelated to the robot's performance, making their trust in the system more resilient to errors when compared to younger adults. Code and supplementary materials are available on our project webpage.
Robust Body Exposure : A Graph-based Dynamics Modeling Approach to Manipulating Blankets over People
Apr 10, 2023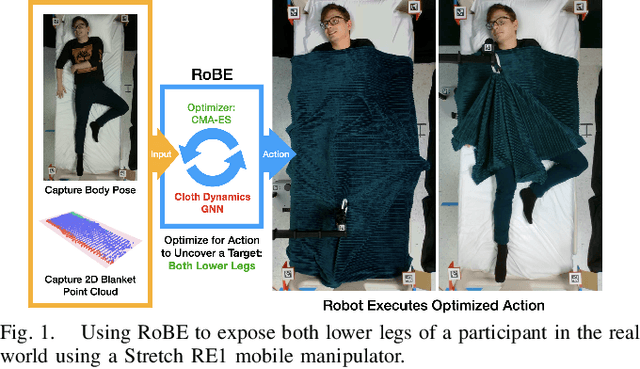

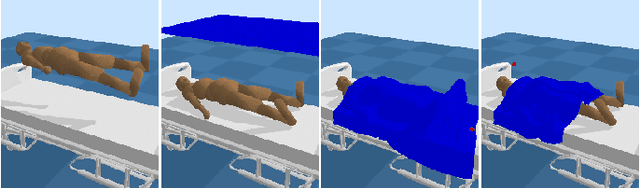
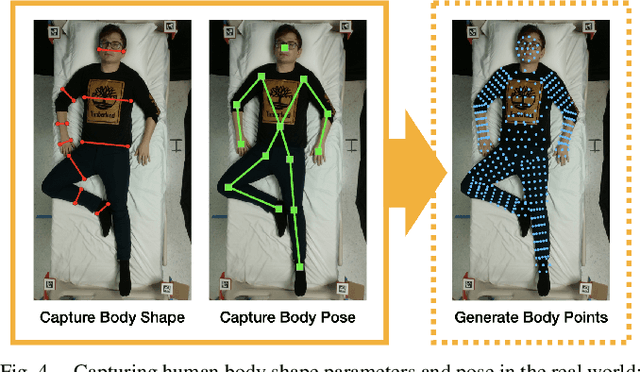
Robotic caregivers could potentially improve the quality of life of many who require physical assistance. However, in order to assist individuals who are lying in bed, robots must be capable of dealing with a significant obstacle: the blanket or sheet that will almost always cover the person's body. We propose a method for targeted bedding manipulation over people lying supine in bed where we first learn a model of the cloth's dynamics. Then, we optimize over this model to uncover a given target limb using information about human body shape and pose that only needs to be provided at run-time. We show how this approach enables greater robustness to variation relative to geometric and reinforcement learning baselines via a number of generalization evaluations in simulation and in the real world. We further evaluate our approach in a human study with 12 participants where we demonstrate that a mobile manipulator can adapt to real variation in human body shape, size, pose, and blanket configuration to uncover target body parts without exposing the rest of the body. Source code and supplementary materials are available online.