 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptable, shape-conforming robotic endoscope
Sep 14, 2024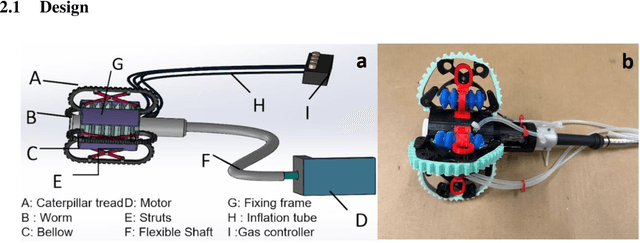
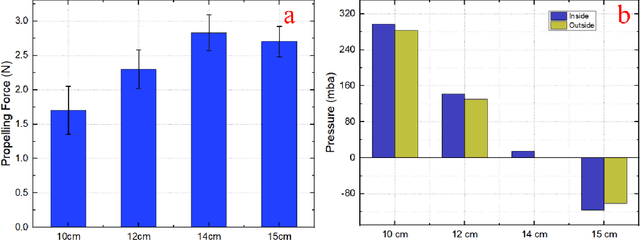
This paper introduces a size-adaptable robotic endoscope design, which aims to improve the efficiency and comfort of colonoscopy. The robotic endoscope proposed in this paper combines the expansion mechanism and the external drive system, which can adjust the shape according to the different pipe diameters, thus improving the stability and propulsion force during propulsion. As an actuator in the expansion mechanism, flexible bellows can provide a normal force of 3.89 N and an axial deformation of nearly 10mm at the maximum pressure, with a 53% expansion rate in the size of expandable tip. In the test of the locomotion performance of the prototype, we obtained the relationship with the propelling of the prototype by changing the friction coefficient of the pipe and the motor angular velocity. In the experiment with artificial bowel tissues, the prototype can generate a propelling force of 2.83 N, and the maximum linear speed is 29.29 m/s in average, and could produce effective propulsion when it passes through different pipe sizes. The results show that the prototype can realize the ability of shape adaptation in order to obtain more propulsion. The relationship between propelling force and traction force, structural optimization and miniaturization still need further exploration.