 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeploying an Aerial Reconfigurable Intelligent Surface for Vehicle-to-Vehicle Communications (PL: Wykorzystanie powietrznych przełączalnych inteligentnych powierzchni do komunikacji międzypojazdowej)
Mar 25, 2025This paper addresses the deployment of a drone equipped with a reconfigurable intelligent surface (RIS), creating a drone relay station (DRS) to enhance the connectivity of vehicle-to-vehicle (V2V) pairs on the ground. The trajectory of the DRS is optimized to quickly reach the best location for maximizing throughput. Additionally, the presence of an interfering node is considered, and an analytical solution is derived to determine the optimal orientation of the DRS at each time step, minimizing interference to the receiver. Simulation results confirm the effectiveness of the proposed framework.
* The contribution of the paper was presented during the 2nd Radiocommunications and ICT Conference (pl. II Konferencja Radiokomunikacji i Teleinformatyki - KRiT 2024) in Poznan, Poland
Enhancing V2X Communications with UAV-mounted Reconfigurable Intelligent Surfaces
Mar 24, 2025This paper addresses the crucial need for reliable wireless communication in vehicular networks, particularly vital for the safety and efficacy of (semi-)autonomous driving amid increasing traffic. We explore the use of Reconfigurable Intelligent Surfaces (RISes) mounted on Drone Relay Stations (DRS) to enhance communication reliability. Our study formulates an optimization problem to pinpoint the optimal location and orientation of the DRS, thereby creating an additional propagation path for vehicle-to-everything (V2X) communications. We introduce a heuristic approach that combines trajectory optimization for DRS positioning and a Q-learning scheme for RIS orientation. Our results not only confirm the convergence of the Q-learning algorithm but also demonstrate significant communication improvements achieved by integrating a DRS into V2X networks.
* The contribution of the paper was presented during the 22nd IEEE International Conference on Pervasive Computing and Communications Workshops and other Affiliated Events, PerCom Workshops 2024 by the IEEE
Neural Networks for Path Planning
Jul 02, 2022


The scientific community is able to present a new set of solutions to practical problems that substantially improve the performance of modern technology in terms of efficiency and speed of computation due to the advancement in neural networks architectures. We present the latest works considering the utilization of neural networks in robot path planning. Our survey shows the contrast between different formulations of the problems that consider different inputs, outputs, and environments and how different neural networks architectures are able to provide solutions to all of the presented problems.
Energy-efficient User Clustering for UAV-enabled Wireless Networks Using EM Algorithm
Jul 02, 2022



Unmanned Aerial Vehicles (UAVs) can be used to provide wireless connectivity to support the existing infrastructure in hot-spots or replace it in cases of destruction. UAV-enabled wireless provides several advantages in network performance due to drone small cells (DSCs) mobility despite the limited onboard energy. However, the problem of resource allocation has added complexity. In this paper, we propose an energy-efficient user clustering mechanism based on Gaussian mixture models (GMM) using a modified Expected-Maximization (EM) algorithm. The algorithm is intended to provide the initial user clustering and drone deployment upon which additional mechanisms can be employed to further enhance the system performance. The proposed algorithm improves the energy efficiency of the system by 25% and link reliability by 18.3% compared to other baseline methods.
On the Placement and Sustainability of Drone FSO Backhaul Relays
May 30, 2022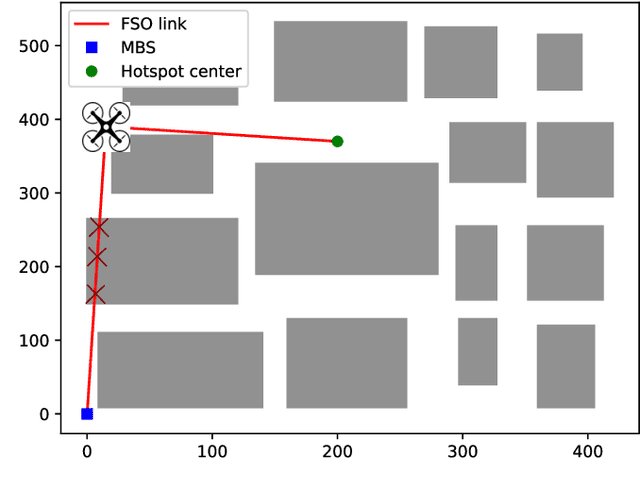
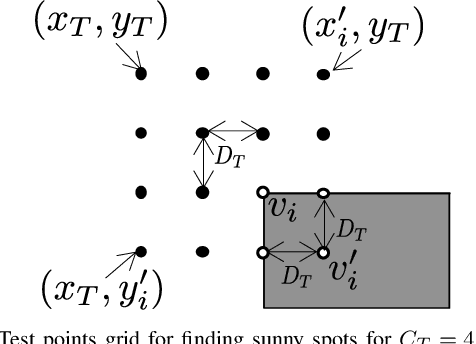
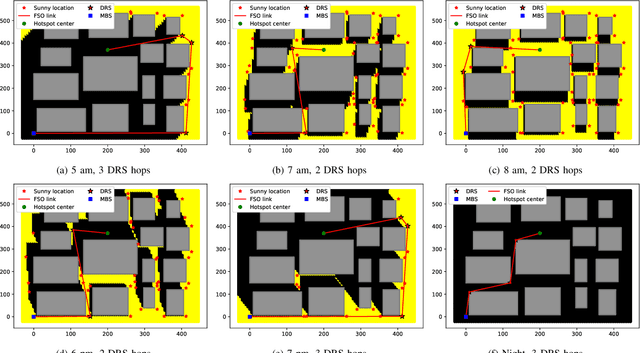
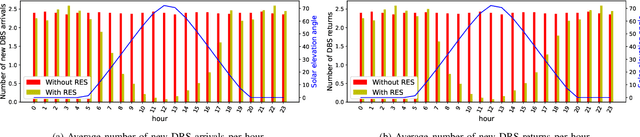
We consider free-space optical (FSO) communication links for the backhaul connectivity of small cells (SCs) where a UAV with an FSO apparatus can serve as a backhaul relay node. We demonstrate how such drone relay stations (DRSs) can be deployed in a high-rise urban area in order to provide FSO line-of-sight (LOS) links that are unobstructed by buildings. Also, in our solution we consider the case where solar panels are mounted on DRSs such that placing the DRS in a sunny location is prioritized, and we show the gain in terms of number of required trips to recharge the UAV.