 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAI-Driven Diabetic Retinopathy Screening: Multicentric Validation of AIDRSS in India
Jan 13, 2025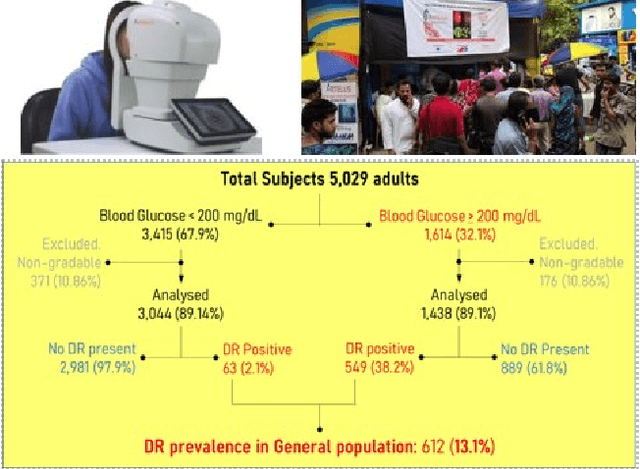



Purpose: Diabetic retinopathy (DR) is a major cause of vision loss, particularly in India, where access to retina specialists is limited in rural areas. This study aims to evaluate the Artificial Intelligence-based Diabetic Retinopathy Screening System (AIDRSS) for DR detection and prevalence assessment, addressing the growing need for scalable, automated screening solutions in resource-limited settings. Approach: A multicentric, cross-sectional study was conducted in Kolkata, India, involving 5,029 participants and 10,058 macula-centric retinal fundus images. The AIDRSS employed a deep learning algorithm with 50 million trainable parameters, integrated with Contrast Limited Adaptive Histogram Equalization (CLAHE) preprocessing for enhanced image quality. DR was graded using the International Clinical Diabetic Retinopathy (ICDR) Scale, categorizing disease into five stages (DR0 to DR4). Statistical metrics including sensitivity, specificity, and prevalence rates were evaluated against expert retina specialist assessments. Results: The prevalence of DR in the general population was 13.7%, rising to 38.2% among individuals with elevated random blood glucose levels. The AIDRSS achieved an overall sensitivity of 92%, specificity of 88%, and 100% sensitivity for detecting referable DR (DR3 and DR4). These results demonstrate the system's robust performance in accurately identifying and grading DR in a diverse population. Conclusions: AIDRSS provides a reliable, scalable solution for early DR detection in resource-constrained environments. Its integration of advanced AI techniques ensures high diagnostic accuracy, with potential to significantly reduce the burden of diabetes-related vision loss in underserved regions.
Robot localization in a mapped environment using Adaptive Monte Carlo algorithm
Jan 02, 2025



Localization is the challenge of determining the robot's pose in a mapped environment. This is done by implementing a probabilistic algorithm to filter noisy sensor measurements and track the robot's position and orientation. This paper focuses on localizing a robot in a known mapped environment using Adaptive Monte Carlo Localization or Particle Filters method and send it to a goal state. ROS, Gazebo and RViz were used as the tools of the trade to simulate the environment and programming two robots for performing localization.
* 9 pages, 11 figures
Calculating Customer Lifetime Value and Churn using Beta Geometric Negative Binomial and Gamma-Gamma Distribution in a NFT based setting
Jan 02, 2025



Customer Lifetime Value (CLV) is an important metric that measures the total value a customer will bring to a business over their lifetime. The Beta Geometric Negative Binomial Distribution (BGNBD) and Gamma Gamma Distribution are two models that can be used to calculate CLV, taking into account both the frequency and value of customer transactions. This article explains the BGNBD and Gamma Gamma Distribution models, and how they can be used to calculate CLV for NFT (Non-Fungible Token) transaction data in a blockchain setting. By estimating the parameters of these models using historical transaction data, businesses can gain insights into the lifetime value of their customers and make data-driven decisions about marketing and customer retention strategies.
Enhancing Early Diabetic Retinopathy Detection through Synthetic DR1 Image Generation: A StyleGAN3 Approach
Jan 01, 2025



Diabetic Retinopathy (DR) is a leading cause of preventable blindness. Early detection at the DR1 stage is critical but is hindered by a scarcity of high-quality fundus images. This study uses StyleGAN3 to generate synthetic DR1 images characterized by microaneurysms with high fidelity and diversity. The aim is to address data scarcity and enhance the performance of supervised classifiers. A dataset of 2,602 DR1 images was used to train the model, followed by a comprehensive evaluation using quantitative metrics, including Frechet Inception Distance (FID), Kernel Inception Distance (KID), and Equivariance with respect to translation (EQ-T) and rotation (EQ-R). Qualitative assessments included Human Turing tests, where trained ophthalmologists evaluated the realism of synthetic images. Spectral analysis further validated image quality. The model achieved a final FID score of 17.29, outperforming the mean FID of 21.18 (95 percent confidence interval - 20.83 to 21.56) derived from bootstrap resampling. Human Turing tests demonstrated the model's ability to produce highly realistic images, though minor artifacts near the borders were noted. These findings suggest that StyleGAN3-generated synthetic DR1 images hold significant promise for augmenting training datasets, enabling more accurate early detection of Diabetic Retinopathy. This methodology highlights the potential of synthetic data in advancing medical imaging and AI-driven diagnostics.
Simultaneous Localization and Mapping (SLAM) using RTAB-MAP
Sep 09, 2018



This paper implements Simultaneous Localization and Mapping (SLAM) technique to construct a map of a given environment. A Real Time Appearance Based Mapping (RTAB-Map) approach was taken for accomplishing this task. Initially, a 2d occupancy grid and 3d octomap was created from a provided simulated environment. Next, a personal simulated environment was created for mapping as well. In this appearance based method, a process called Loop Closure is used to determine whether a robot has seen a location before or not. In this paper, it is seen that RTAB-Map is optimized for large scale and long term SLAM by using multiple strategies to allow for loop closure to be done in real time and the results depict that it can be an excellent solution for SLAM to develop robots that can map an environment in both 2d and 3d.
* 7 pages, 13 figures