 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLatent Space Inference For Spatial Transcriptomics
Nov 01, 2023In order to understand the complexities of cellular biology, researchers are interested in two important metrics: the genetic expression information of cells and their spatial coordinates within a tissue sample. However, state-of-the art methods, namely single-cell RNA sequencing and image based spatial transcriptomics can only recover a subset of this information, either full genetic expression with loss of spatial information, or spatial information with loss of resolution in sequencing data. In this project, we investigate a probabilistic machine learning method to obtain the full genetic expression information for tissues samples while also preserving their spatial coordinates. This is done through mapping both datasets to a joint latent space representation with the use of variational machine learning methods. From here, the full genetic and spatial information can be decoded and to give us greater insights on the understanding of cellular processes and pathways.
Gaze-based Learning from Demonstration In Surgical Robotics
Nov 01, 2023

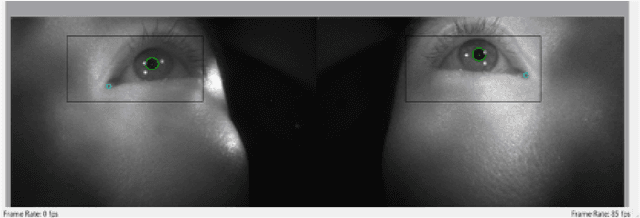

Surgical robotics is a rising field in medical technology and advanced robotics. Robot assisted surgery, or robotic surgery, allows surgeons to perform complicated surgical tasks with more precision, automation, and flexibility than is possible for traditional surgical approaches. The main type of robot assisted surgery is minimally invasive surgery, which could be automated and result in a faster healing time for the patient. The surgical robot we are particularly interested in is the da Vinci surgical system, which is developed and manufactured by Intuitive Surgical. In the current iteration of the system, the endoscopic camera arm on the da Vinci robot has to be manually controlled and calibrated by the surgeon during a surgical task, which interrupts the flow of the operation. The main goal of this capstone project is to automate the motion of the camera arm using a probabilistic model based on surgeon eye gaze data and da Vinci robot kinematic data.