 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHaptic Shared Control in Steering Operation Based on Cooperative Status Between a Driver and a Driver Assistance System
Apr 22, 2015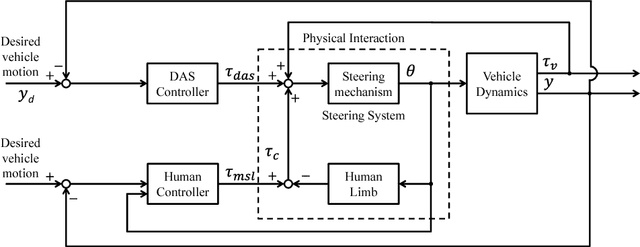


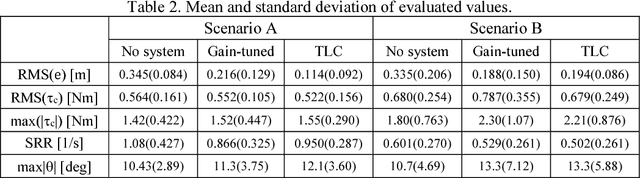
Haptic shared control is expected to achieve a smooth collaboration between humans and automated systems, because haptics facilitate mutual communication. A methodology for sharing a given task is important to achieve effective shared control. Therefore, the appropriate cooperative relationship between a human operator and automated system should be considered. This paper proposes a methodology to evaluate the cooperative status between the operator and the automated system in the haptic shared control of a steering operation using a pseudo-power pair of torque from each agent and the vehicle lateral velocity as each agent's contribution to vehicle motion. This method allows us to estimate cooperative status based on two axes: the initiative holder and the intent consistency between the two agents. A control method for a lane-keeping assist system (LKAS) that enables drivers to change lanes smoothly is proposed based on the estimated cooperative status. A gain-tuning control method based on the estimated cooperative status is proposed to decrease the assistance system's pseudo-power when intent inconsistency occurs. A method for switching the followed lane to match the driver's and assistance system's intentions is also proposed. A user study using a driving simulator is conducted to demonstrate the effectiveness of the proposed methods. The results demonstrate that the proposed methods facilitate smooth driver-initiated lane changes without significantly affecting the driver's torque or steering wheel angle while significantly improve lane-keeping performance.