 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Line-Of-Sight guidance law based on vector fields path following for underactuated unmanned surface vehicle
Apr 05, 2024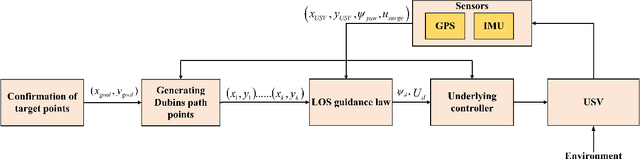
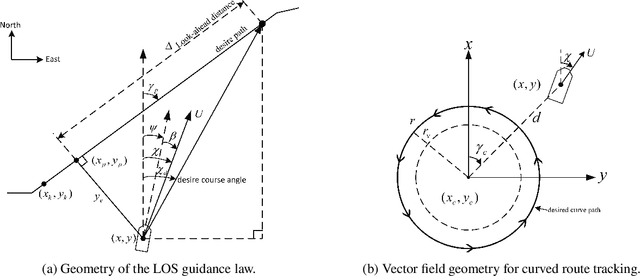
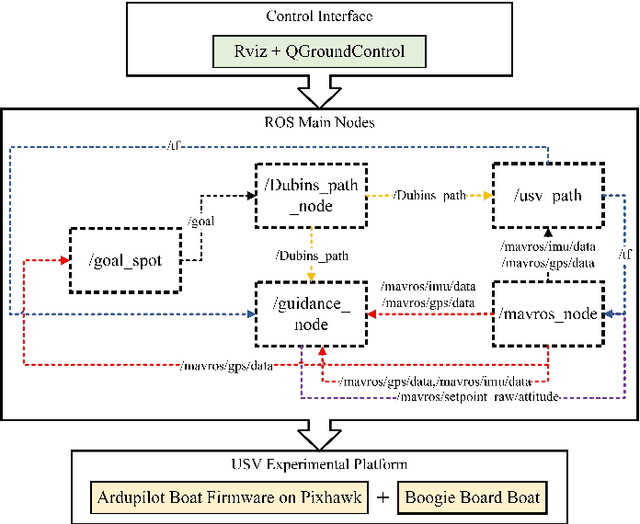
The focus of this paper is to develop a methodology that enables an unmanned surface vehicle (USV) to efficiently track a planned path. The introduction of a vector field-based adaptive line of-sight guidance law (VFALOS) for accurate trajectory tracking and minimizing the overshoot response time during USV tracking of curved paths improves the overall line-of-sight (LOS) guidance method. These improvements contribute to faster convergence to the desired path, reduce oscillations, and can mitigate the effects of persistent external disturbances. It is shown that the proposed guidance law exhibits k-exponential stability when converging to the desired path consisting of straight and curved lines. The results in the paper show that the proposed method effectively improves the accuracy of the USV tracking the desired path while ensuring the safety of the USV work.