Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeADAMANT: A Pipeline for Adaptable Manipulation Tasks
Sep 14, 2022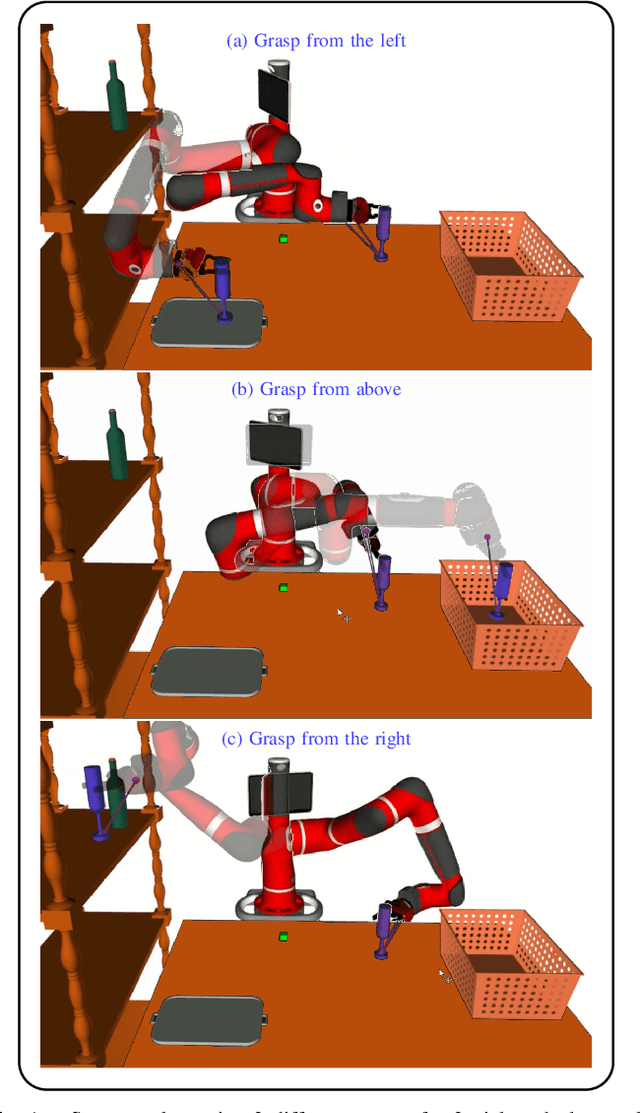
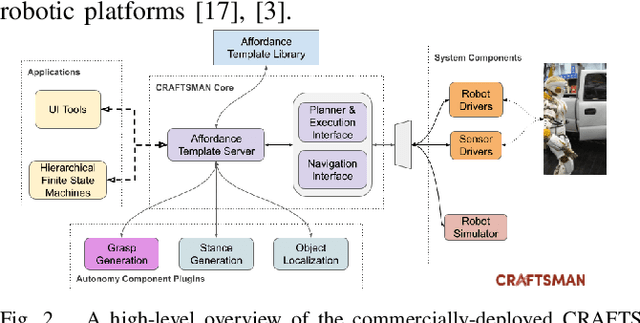
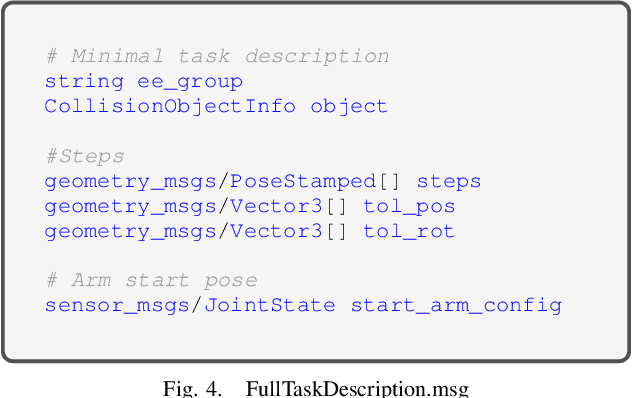
This paper presents ADAMANT, a set of software modules that provides grasp planning capabilities to an existing robot planning and control software framework. Our presented work allows a user to adapt a manipulation task to be used under widely different scenarios with minimal user input, thus reducing the operator's cognitive load. The developed tools include (1) plugin-based components that make it easy to extend default capabilities and to use third-party grasp libraries, (2) An object-centric way to define task constraints, (3) A user-friendly Rviz interface to use the grasp planner utilities, and (4) Interactive tools to use perception data to program a task. We tested our framework on a wide variety of robot simulations.
* Preprint. In review
Via