 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinuous-time Trajectory Estimation: A Comparative Study Between Gaussian Process and Spline-based Approaches
Feb 01, 2024Continuous-time trajectory estimation is an attractive alternative to discrete-time batch estimation due to the ability to incorporate high-frequency measurements from asynchronous sensors while keeping the number of optimization parameters bounded. Two types of continuous-time estimation have become prevalent in the literature: Gaussian process regression and spline-based estimation. In this paper, we present a direct comparison between these two methods. We first compare them using a simple linear system, and then compare them in a camera and IMU sensor fusion scenario on SE(3) in both simulation and hardware. Our results show that if the same measurements and motion model are used, the two methods achieve similar trajectory accuracy. In addition, if the spline order is chosen so that the degree-of-differentiability of the two trajectory representations match, then they achieve similar solve times as well.
Globally-Attractive Logarithmic Geometric Control of a Quadrotor for Aggressive Trajectory Tracking
Sep 15, 2021
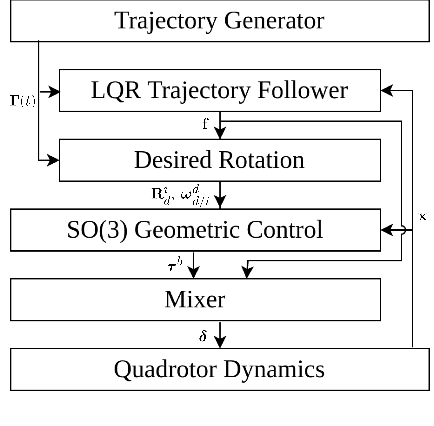
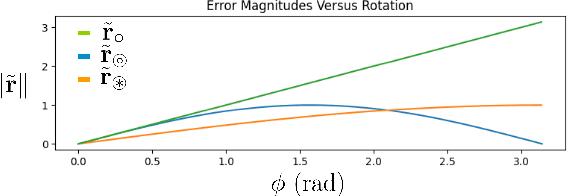
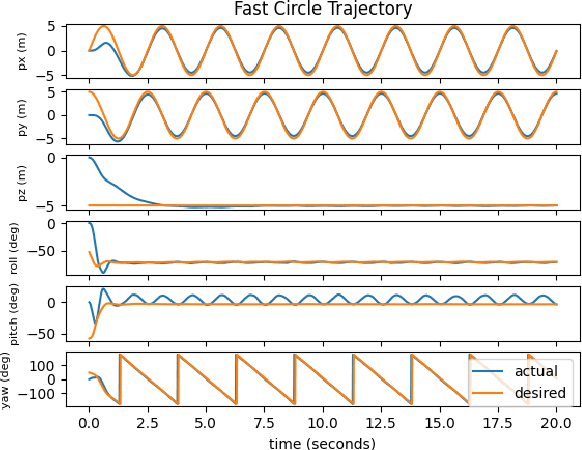
We present a new quadrotor geometric control scheme that is capable of tracking highly aggressive trajectories. Unlike previous works, our geometric controller uses the logarithmic map of SO(3) to express rotational error in the Lie algebra, allowing us to treat the manifold in a more effective and natural manner, and can be shown to be globally attractive. We show the performance of our control scheme against highly aggressive trajectories in simulation experiments. Additionally, we present an adaptation of this controller that allows us to interface effectively with the angular rate controllers on an onboard flight control unit and show the ability of this adapted control scheme to track aggressive trajectories on a quadrotor hardware platform.