 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative Salvo Guidance over Leader-Follower Network with Free-Will Arbitrary Time Convergence
Jul 22, 2024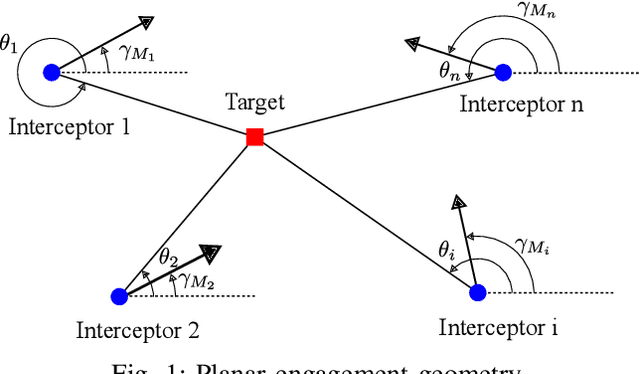
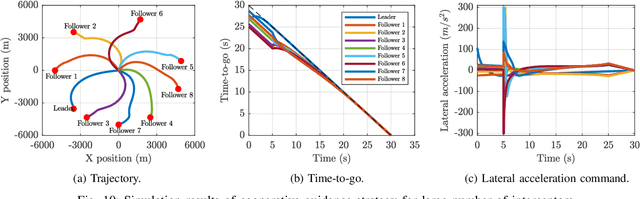
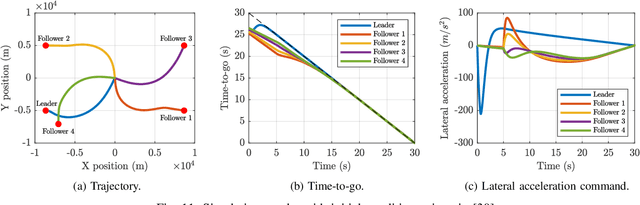
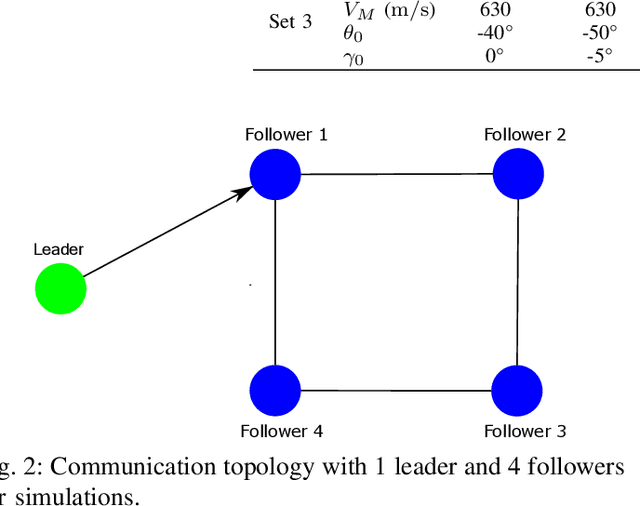
A cooperative salvo strategy is proposed in this paper which achieves consensus among the interceptors within a pre-defined arbitrary settling time. Considering non-linear engagement kinematics and a system lag to capture the effect of interceptor autopilot as present in realistic interception scenarios, the guidance schemes use the time-to-go estimates of the interceptors in order to achieve simultaneous interception of a stationary target at a pre-determined impact time. The guidance scheme ensures that consensus among the time-to-go estimates of the interceptors is achieved within a settling time whose upper bound can be pre-specified arbitrarily independent of the initial conditions or design parameters. The efficacy of the proposed guidance strategy is demonstrated using numerical simulations with varied conditions of initial position, velocities and heading angle errors of the interceptors as well as different desired impact times.