 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA White-Box SVM Framework and its Swarm-Based Optimization for Supervision of Toothed Milling Cutter through Characterization of Spindle Vibrations
Dec 15, 2021
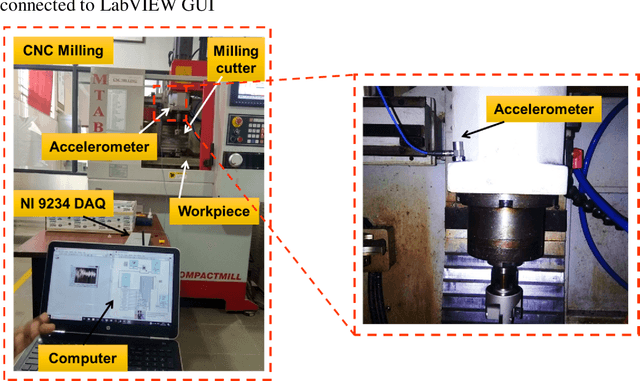

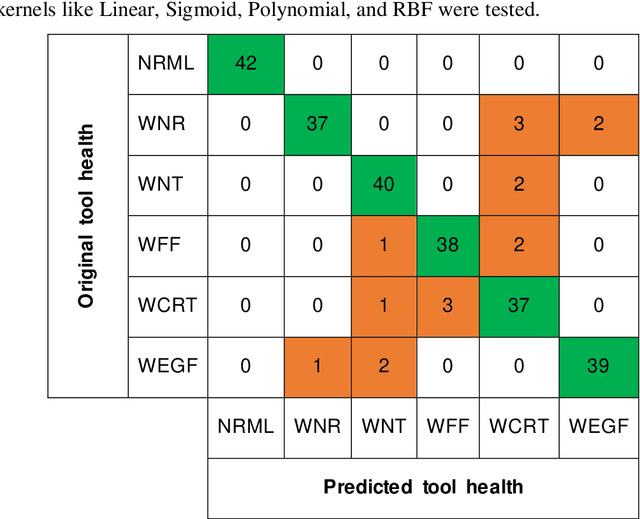
In this paper, a white-Box support vector machine (SVM) framework and its swarm-based optimization is presented for supervision of toothed milling cutter through characterization of real-time spindle vibrations. The anomalous moments of vibration evolved due to in-process tool failures (i.e., flank and nose wear, crater and notch wear, edge fracture) have been investigated through time-domain response of acceleration and statistical features. The Recursive Feature Elimination with Cross-Validation (RFECV) with decision trees as the estimator has been implemented for feature selection. Further, the competence of standard SVM has been examined for tool health monitoring followed by its optimization through application of swarm based algorithms. The comparative analysis of performance of five meta-heuristic algorithms (Elephant Herding Optimization, Monarch Butterfly Optimization, Harris Hawks Optimization, Slime Mould Algorithm, and Moth Search Algorithm) has been carried out. The white-box approach has been presented considering global and local representation that provides insight into the performance of machine learning models in tool condition monitoring.
Modeling and Analysis of Unmanned Remote Guided Vehicle on Rough and Loose Snow Terrain
Jan 13, 2021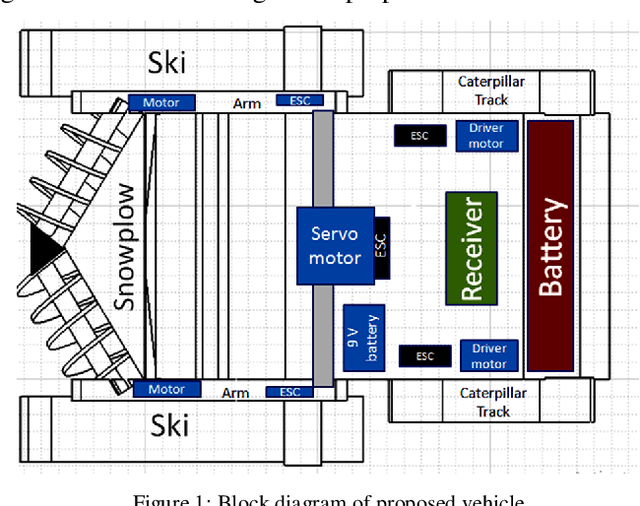
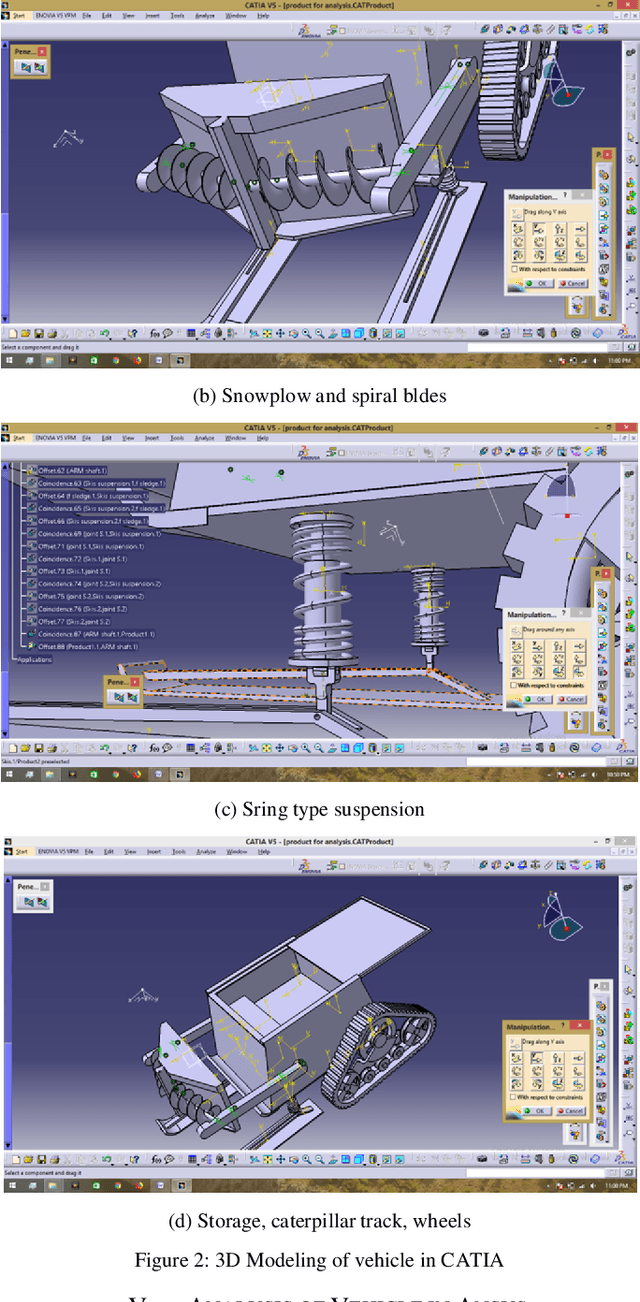


Survival in remote snow bounded areas is unsafe and risky for mankind. Many problems like arthritis, frostbite, asthma, starvation can caused and lead to death. Indian Military provides transportation vehicles which are heavily built and needs manpower for monitoring. Hence it necessitates facilitating compact transportation to fulfill all requirements. This research aimed at design and analysis of mobile unmanned vehicle for transportation & providing medical help, food and other essential things necessary for surviving in such areas. This can also be used for military services to save the life of solider with less risk. It is typical medium weight, high speed vehicle which carries up to 35 kg load and can negotiate through loose snow, rough terrain with use of caterpillar track. The noteworthy feature of the vehicle is that it constitutes of spiral blades and V shape snowplow to make its way through snow. Hence it will repel the snow in outward direction for self-extraction. It also incorporates skis and hubs for changing the direction and smooth suspension. 3D model of the vehicle is drafted in CATIA and structural analysis is carried out in ANSYS. Control system design and mechatronics integration is proposed to develop the prototype by assembling various components.