 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplaining human body responses in random vibration: Effect of motion direction, sitting posture, and anthropometry
Jun 21, 2023This study investigates the effects of anthropometric attributes, biological sex, and posture on translational body kinematic responses in translational vibrations. In total, 35 participants were recruited. Perturbations were applied on a standard car seat using a motion-based platform with 0.1 to 12.0 Hz random noise signals, with 0.3 m/s2 rms acceleration, for 60 seconds. Multiple linear regression models (three basic models and one advanced model, including interactions between predictors) were created to determine the most influential predictors of peak translational gains in the frequency domain per body segment (pelvis, trunk, and head). The models introduced experimentally manipulated factors (motion direction, posture, measured anthropometric attributes, and biological sex) as predictors. Effects of included predictors on the model fit were estimated. Basic linear regression models could explain over 70% of peak body segments' kinematic body response (where the R2 adjusted was 0.728). The inclusion of additional predictors (posture, body height and weight, and biological sex) did enhance the model fit, but not significantly (R2 adjusted was 0.730). The multiple stepwise linear regression, including interactions between predictors, accounted for the data well with an adjusted R2 of 0.907. The present study shows that perturbation direction and body segment kinematics are crucial factors influencing peak translational gains. Besides the body segments' response, perturbation direction was the strongest predictor. Adopted postures and biological sex do not significantly affect kinematic responses.
A Two-Stage Bayesian Optimisation for Automatic Tuning of an Unscented Kalman Filter for Vehicle Sideslip Angle Estimation
Jun 30, 2022
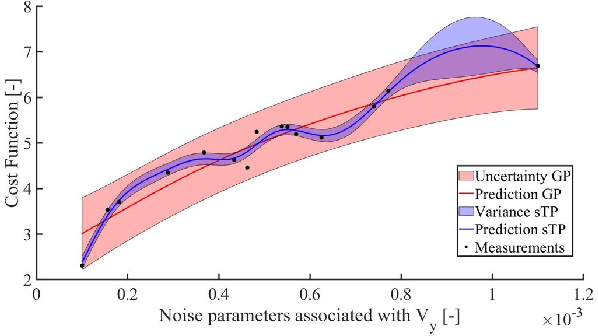
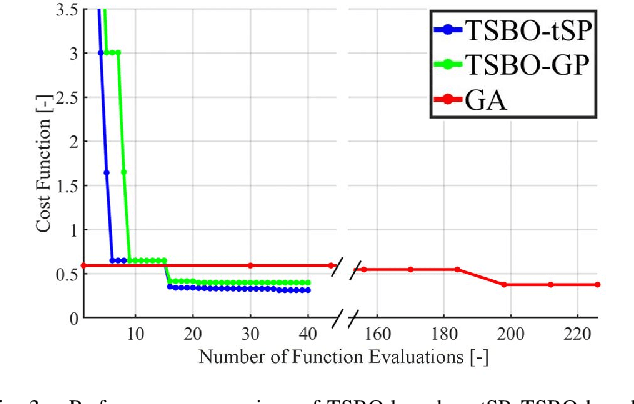
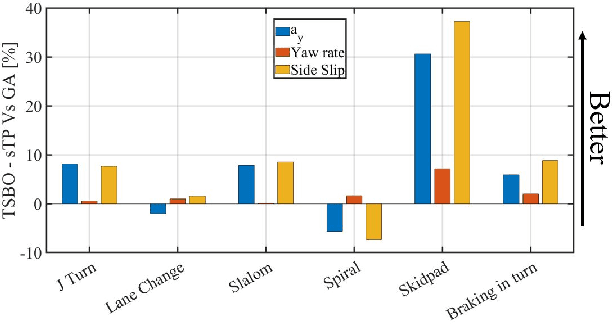
This paper presents a novel methodology to auto-tune an Unscented Kalman Filter (UKF). It involves using a Two-Stage Bayesian Optimisation (TSBO), based on a t-Student Process to optimise the process noise parameters of a UKF for vehicle sideslip angle estimation. Our method minimises performance metrics, given by the average sum of the states' and measurement' estimation error for various vehicle manoeuvres covering a wide range of vehicle behaviour. The predefined cost function is minimised through a TSBO which aims to find a location in the feasible region that maximises the probability of improving the current best solution. Results on an experimental dataset show the capability to tune the UKF in 79.9% less time than using a genetic algorithm (GA) and the overall capacity to improve the estimation performance in an experimental test dataset of 9.9% to the current state-of-the-art GA.