 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeState-Space Identification of Unmanned Helicopter Dynamics using Invasive Weed Optimization Algorithm on Flight Data
Sep 02, 2018
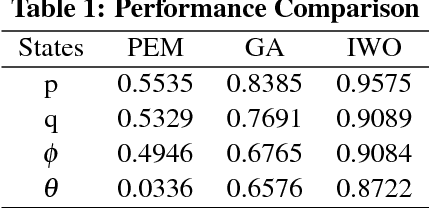
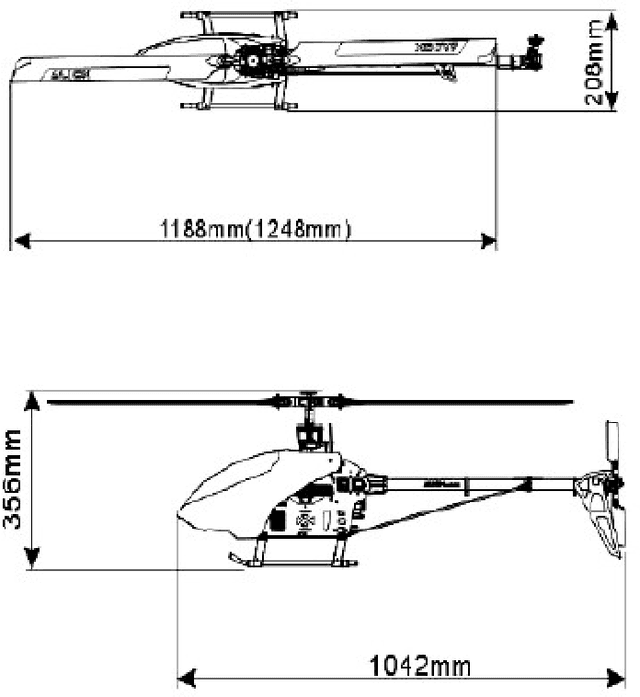
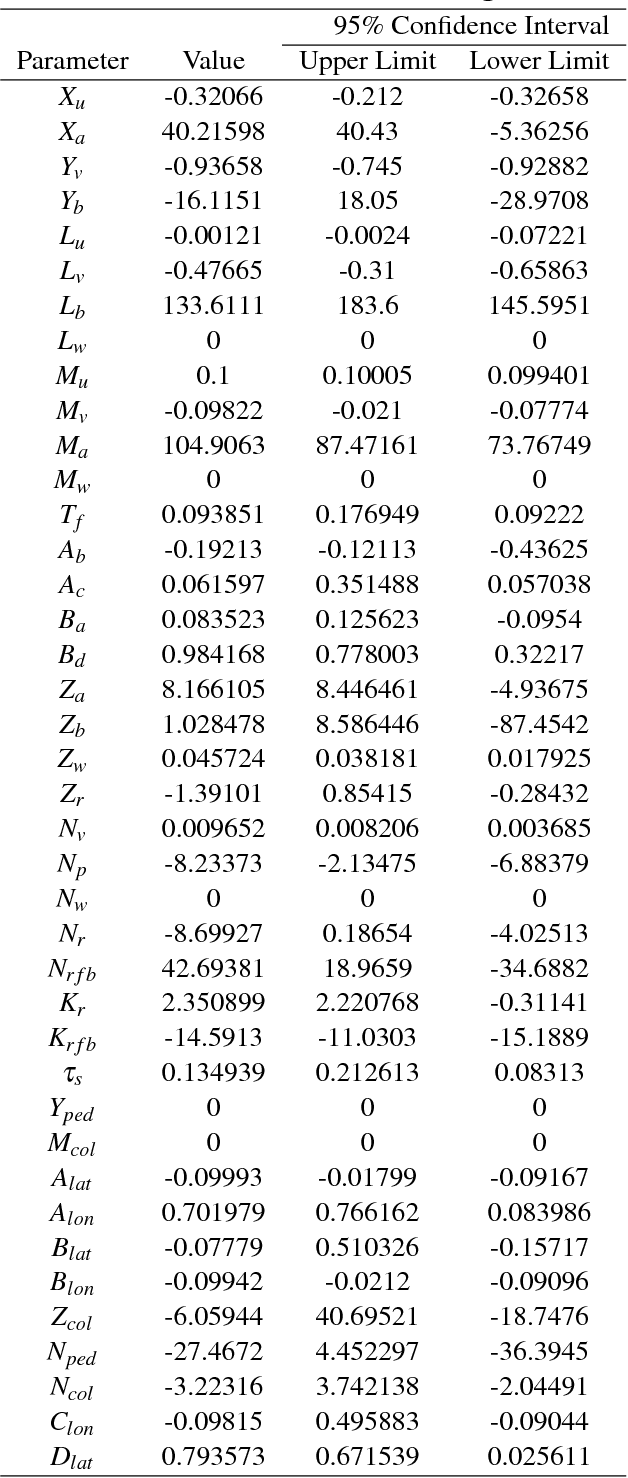
In order to achieve a good level of autonomy in unmanned helicopters, an accurate replication of vehicle dynamics is required, which is achievable through precise mathematical modeling. This paper aims to identify a parametric state-space system for an unmanned helicopter to a good level of accuracy using Invasive Weed Optimization (IWO) algorithm. The flight data of Align TREX 550 flybarless helicopter is used in the identification process. The rigid-body dynamics of the helicopter is modeled in a state-space form that has 40 parameters, which serve as control variables for the IWO algorithm. The results after 1000 iterations were compared with the traditionally used Prediction Error Minimization (PEM) method and also with Genetic Algorithm (GA), which serve as references. Results show a better level of correlation between the actual and estimated responses of the system identified using IWO to that of PEM and GA.