 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Multi-Human Multi-Robot Remote Interaction: A Study of Transparency, Inter-Human Communication, and Information Loss in Remote Interaction
Feb 04, 2021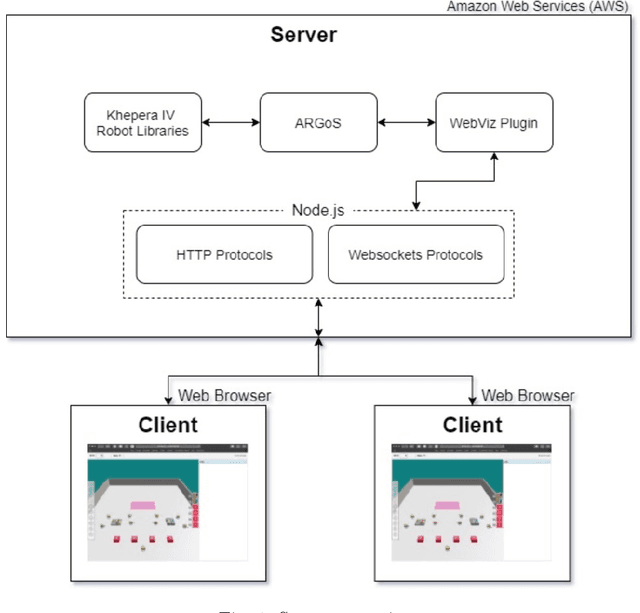

In this paper, we investigate how to design an effective interface for remote multi-human multi-robot interaction. While significant research exists on interfaces for individual human operators, little research exists for the multi-human case. Yet, this is a critical problem to solve to make complex, large-scale missions achievable in which direct human involvement is impossible or undesirable, and robot swarms act as a semi-autonomous agents. This paper's contribution is twofold. The first contribution is an exploration of the design space of computer-based interfaces for multi-human multi-robot operations. In particular, we focus on information transparency and on the factors that affect inter-human communication in ideal conditions, i.e., without communication issues. Our second contribution concerns the same problem, but considering increasing degrees of information loss, defined as intermittent reception of data with noticeable gaps between individual receipts. We derived a set of design recommendations based on two user studies involving 48 participants.